

Animal injury device capable of autonomously controlling impact force
A technology of autonomous control and strength, applied in the direction of animal restraint equipment, medical science, veterinary instruments, etc., can solve the problems of uncontrollable strength, affecting the research of impact injury, and adversely affecting the treatment effect of injured patients, so as to facilitate impact experiments, improve Fixed effects, data-rich effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
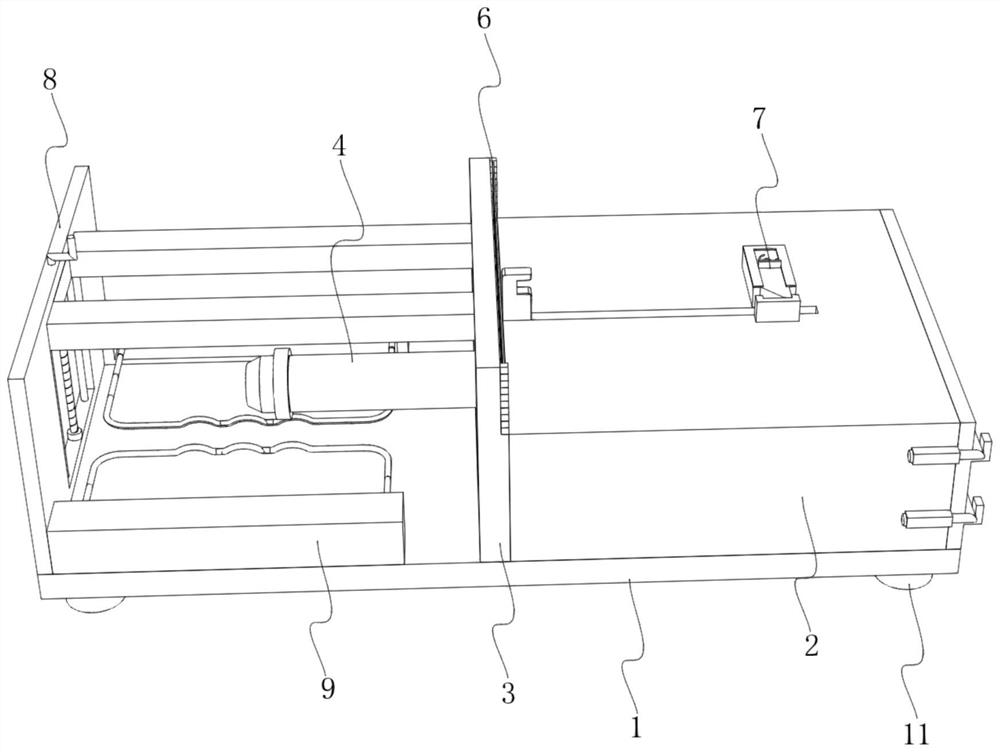
[0037] refer to figure 1 , a preferred embodiment of the present invention includes a base 1, a transmission chamber 2 is provided on the top of the base 1 and near the right side edge, and three sets of cylindrical movable chambers 21 are opened inside the transmission chamber 2, and between the movable chambers 21 Connected to each other, the top of the base 1 and the left side of the transmission compartment 2 are welded and fixed with a fixed plate 3, the interior of the transmission compartment 2 and near the left edge are provided with an impact assembly 4, and the right side of the impact assembly 4 displaces each movable chamber The interior of 21 is provided with ejection assembly 5, the right side of fixed plate 3 and is positioned at the top of transmission chamber 2 and is provided with the elastic band 6 of array distribution, and the top of transmission chamber 2 is installed with fixed assembly 7 near the edge of right side, and base A baffle 8 is welded and fix...
Embodiment 2
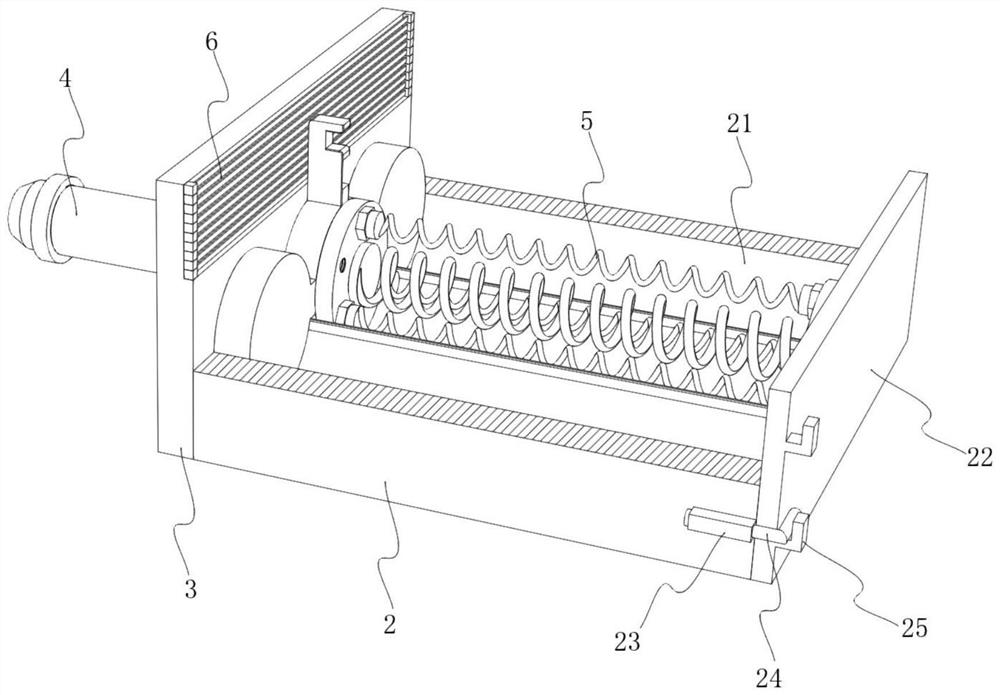
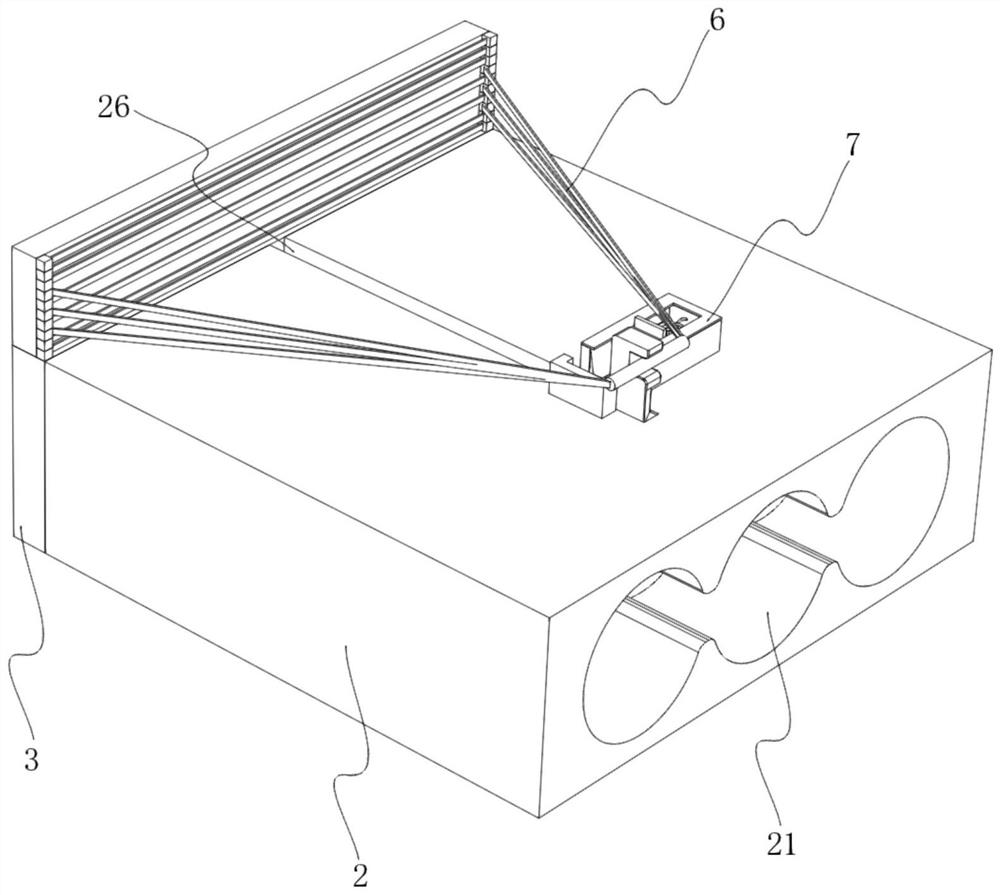
[0040] refer to Figure 2-6 , in a preferred embodiment, the right side of the transmission compartment 2 is provided with a compartment door 22, the rear side of the compartment door 22 is hinged with the side wall of the transmission compartment 2, and the front side of the transmission compartment 2 is provided with a Fixed blocks 23 parallel to each other, each fixed block 23 is provided with a movable rod 24, the movable rod 24 is connected with the fixed block 23 in rotation, the movable rod 24 is an L-shaped structure, and the right side of the door 22 is set near the front edge There are blocks 25 parallel to each other, and the movable rod 24 is engaged with the blocks 25. A chute 26 is provided on the top of the transmission chamber 2 near the left end, and the ejection assembly 5 in the movable chamber 21 is conveniently adjusted through the chamber door 22. , so as to facilitate the control of different forces for impact experiments.
[0041] In a preferred embodi...
Embodiment 3
[0047] refer to Figure 7 , in a preferred embodiment, the fixed assembly 7 includes a fixed frame 71, the fixed frame 71 is located at the rear side of the chute 26, and is welded to the top of the transmission bin 2, and the inside of the fixed frame 71 is provided with a movable frame near the front edge. Plate 72, movable plate 72 is slidably connected with fixed frame 71, the rear side of movable plate 72 is provided with the 3rd spring 73, and one end of the 3rd spring 73 is welded and fixed with fixed frame 71, and the other end of the 3rd spring 73 is connected with movable plate 72 Welding is fixed, and the front side of movable plate 72 and is positioned at the front side of chute 26 are provided with limit frame 74, and limit frame 74 is welded with the top of transmission bin 2, and movable plate 72 is clamped and matched with limit frame 74, thereby makes movable The plate 72 can limit the slider 42, so as to facilitate the control of the impact test.
[0048] In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More