

Unmanned vehicle driving control method and device and electronic equipment
A control method and unmanned vehicle technology, applied in the field of devices and electronic equipment, and unmanned vehicle driving control methods, can solve problems such as limited sensing range, inaccurate prediction results and actual conditions, and unstable perception capabilities of unmanned vehicles. To achieve the effect of improving driving strategy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
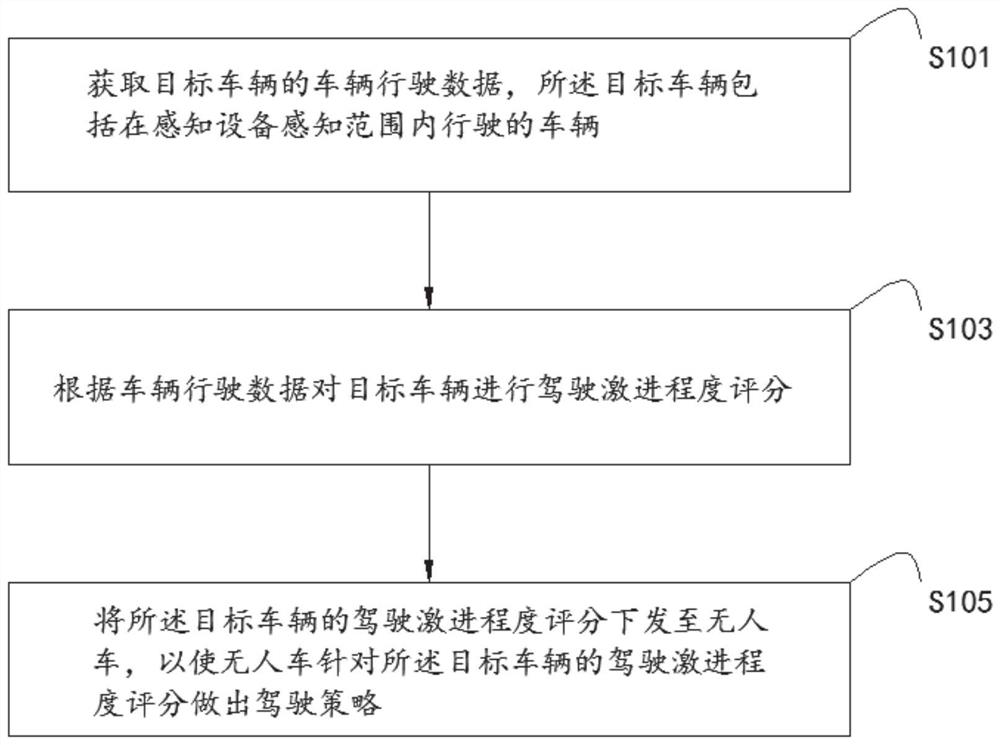
[0036] figure 1 It is a schematic flowchart of an unmanned vehicle driving control method provided in Embodiment 1.
[0037] A kind of unmanned vehicle driving control method that embodiment 1 provides, comprises the following steps:
[0038] S101. Acquire vehicle travel data of a target vehicle, where the target vehicle includes a vehicle traveling within a sensing range of a sensing device.
[0039] Specifically, the vehicle driving data of the target vehicle is acquired, and the vehicle driving data includes but not limited to: behaviors violating traffic rules, behaviors unfriendly to driving vehicles, and uncivilized driving behaviors.
[0040] The violations of traffic rules include but are not limited to: speeding behavior of the vehicle, lane changing behavior of the vehicle, frequent lane changing behavior of the vehicle, and emergency cut-in behavior of the vehicle.
[0041] The uncivilized driving behavior of the vehicle includes, but is not limited to: the throwi...
Embodiment 2
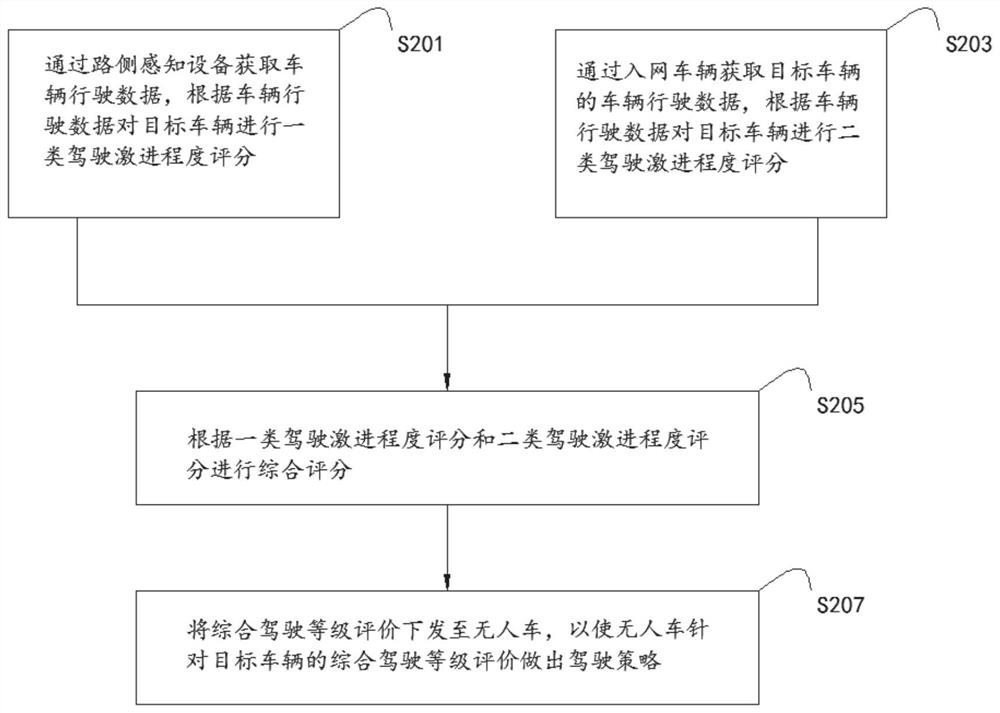
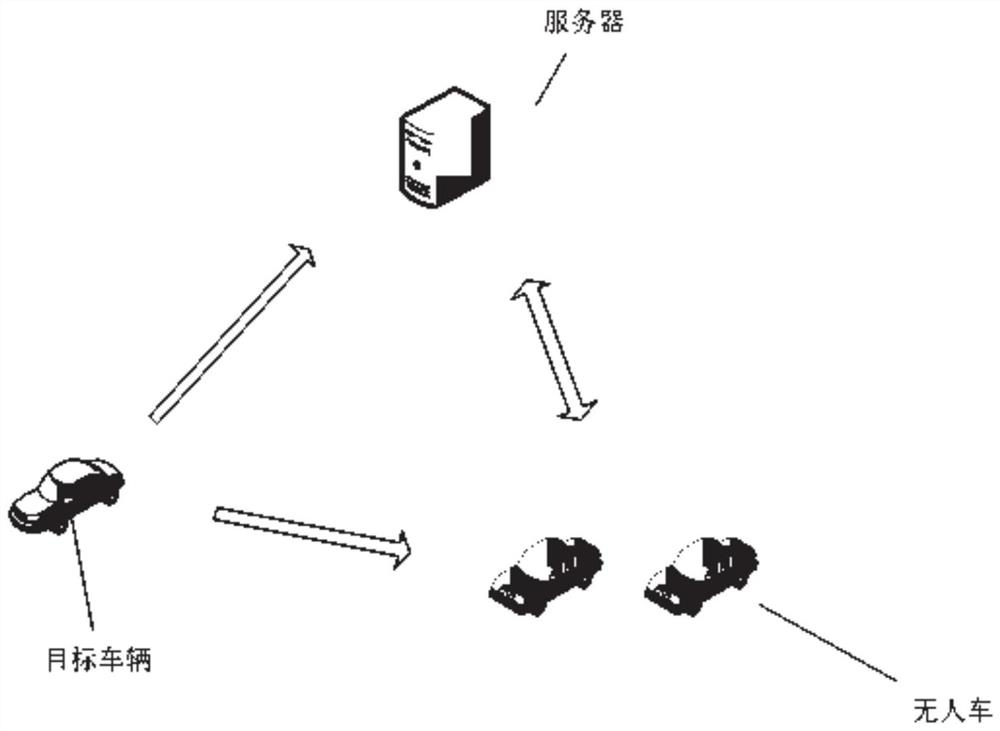
[0071] see figure 2 shown and image 3 as shown, figure 2 It is a schematic flow chart of an unmanned vehicle driving control method provided in Embodiment 2, image 3 It is a schematic diagram of a scene of an unmanned vehicle driving control method provided in Embodiment 2.
[0072] On the basis of embodiment 1, a kind of unmanned vehicle driving control method that embodiment 2 provides, comprises the following steps:
[0073] S201, acquiring vehicle driving data through a roadside sensing device, and scoring a category of driving aggressiveness of the target vehicle according to the vehicle driving data.
[0074] Specifically, the vehicle driving data of the target vehicle is acquired, and the vehicle driving data includes but not limited to: behaviors violating traffic rules, behaviors unfriendly to driving vehicles, and uncivilized driving behaviors.
[0075] The violations of traffic rules include but are not limited to: speeding behavior of the vehicle, lane chan...
Embodiment 3
[0099] see Figure 4 shown, Figure 4 It is a schematic structural diagram of an unmanned vehicle driving control device provided in Embodiment 3.
[0100] An unmanned vehicle driving control device provided in embodiment 3, comprising:
[0101] A data acquisition module 301, configured to acquire vehicle travel data of a target vehicle, where the target vehicle includes a vehicle traveling within the sensing range of the sensing device;
[0102] A scoring module 303, configured to score the driving aggressiveness of the target vehicle according to the vehicle driving data;
[0103] The score processing module 305 is configured to send the driving aggressiveness score of the target vehicle to the unmanned vehicle, so that the unmanned vehicle can make a driving strategy based on the driving aggressiveness score of the target vehicle.
[0104] The preset and judgment module is used to set the standard score. If the target vehicle has any behavior of violating traffic rules, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More