

Route guidance method of self-propelled device
A path-guided, self-propelled technology, used in manipulators, manufacturing tools, etc., can solve the problems of CCD cameras unable to identify reflectors, mobile robots unable to perform position detection, and increasing the manufacturing cost of mobile robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
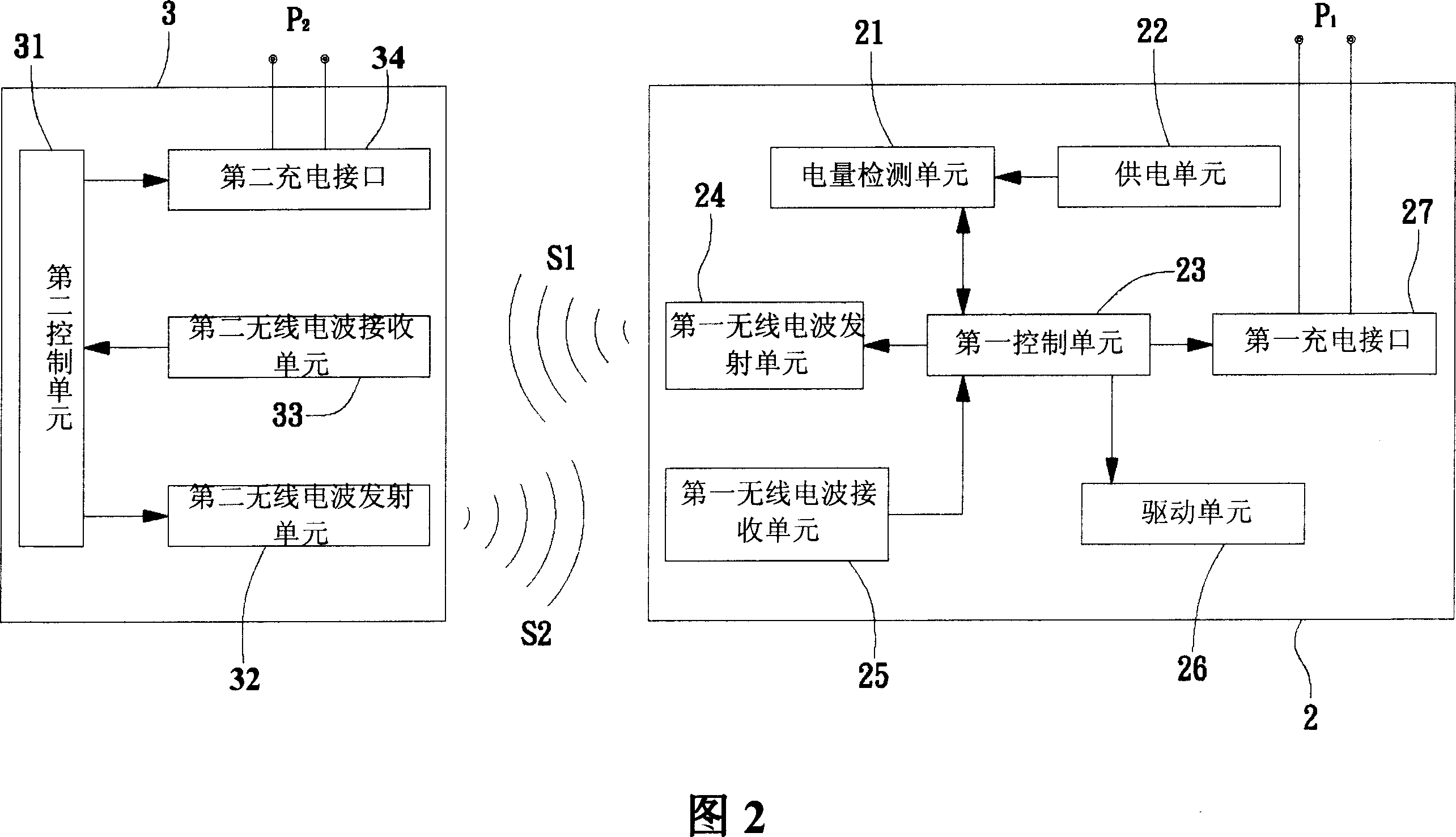
[0065] Please refer to FIG. 2 , which is a circuit block diagram of the self-propelled device and the calling device of the present invention. The self-propelled device 2 includes a power detection unit 21, a power supply unit 22, a first control unit 23, a first radio wave transmitting unit 24, a first radio wave receiving unit 25, a driving unit 26 and a first The charging interface 27 ; the calling device 3 includes a second control unit 31 , a second radio wave transmitting unit 32 , a second radio wave receiving unit 33 and a second charging interface 34 . Among them, the power detection unit 21 can detect the power of the power supply unit 22, and transmit the detection result to the first control unit 23. When the power is too low, the first control unit 23 will send a first radio through the first wireless transmission unit 24. wave signal (S1), when the second radio wave receiving unit 33 receives the first radio wave signal (S1), it will send the signal back to the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More