

Multifunctional gantry type six-shaft industrial robot
An industrial robot, gantry technology, used in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as small operating range, difficult control algorithms, and limited motion range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention is described in more detail below in conjunction with accompanying drawing example:
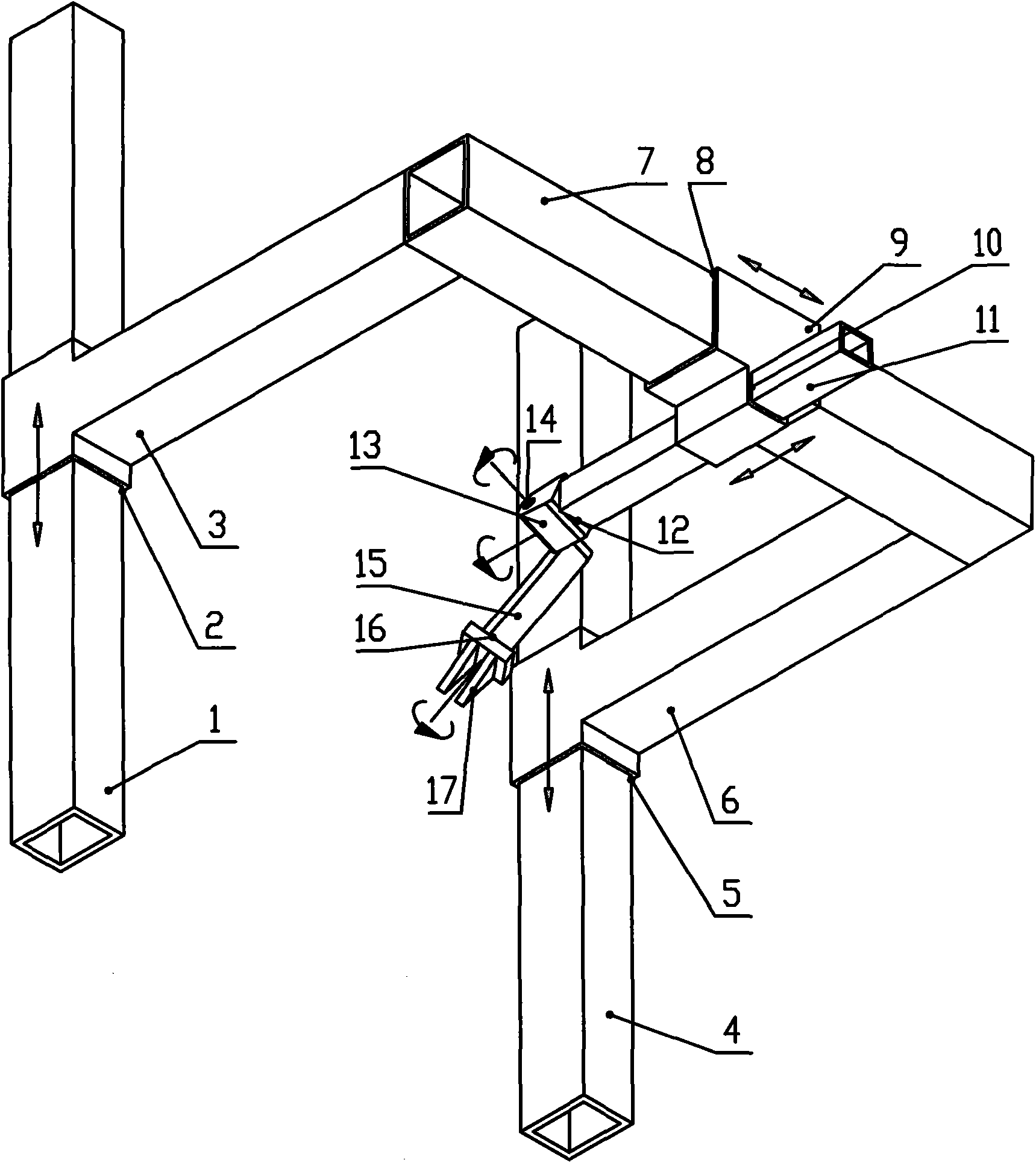
[0011] combine figure 1 , the composition of the present invention includes a first track 1, a first moving joint axis 2, a first column 3, a second track 4, a second moving joint axis 5, a second column 6, a beam 7, a third moving joint axis 8, The moving arm 9, the fourth moving joint axis 10, the lifting arm 11, the first rotating joint axis 12, the first rotating arm 13, the second rotating joint axis 14, the second rotating arm 15, the third rotating joint axis 16 and the end execution device 17.
[0012] The first column 3 and the second column 6 are installed on the first track 1 and the second track 4 through the first moving joint axis 2 and the second moving joint axis 5 respectively, and the beam 7 is installed on the first column 3 and the second column 6 between. The moving arm 9 is mounted on the beam 7 through the third moving joint axis 8 . The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More