

Shuttlecock robot and control method thereof
A robot and shuttlecock technology, applied in the field of robotics, can solve the problems of data processing and action feedback limited to two-dimensional space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
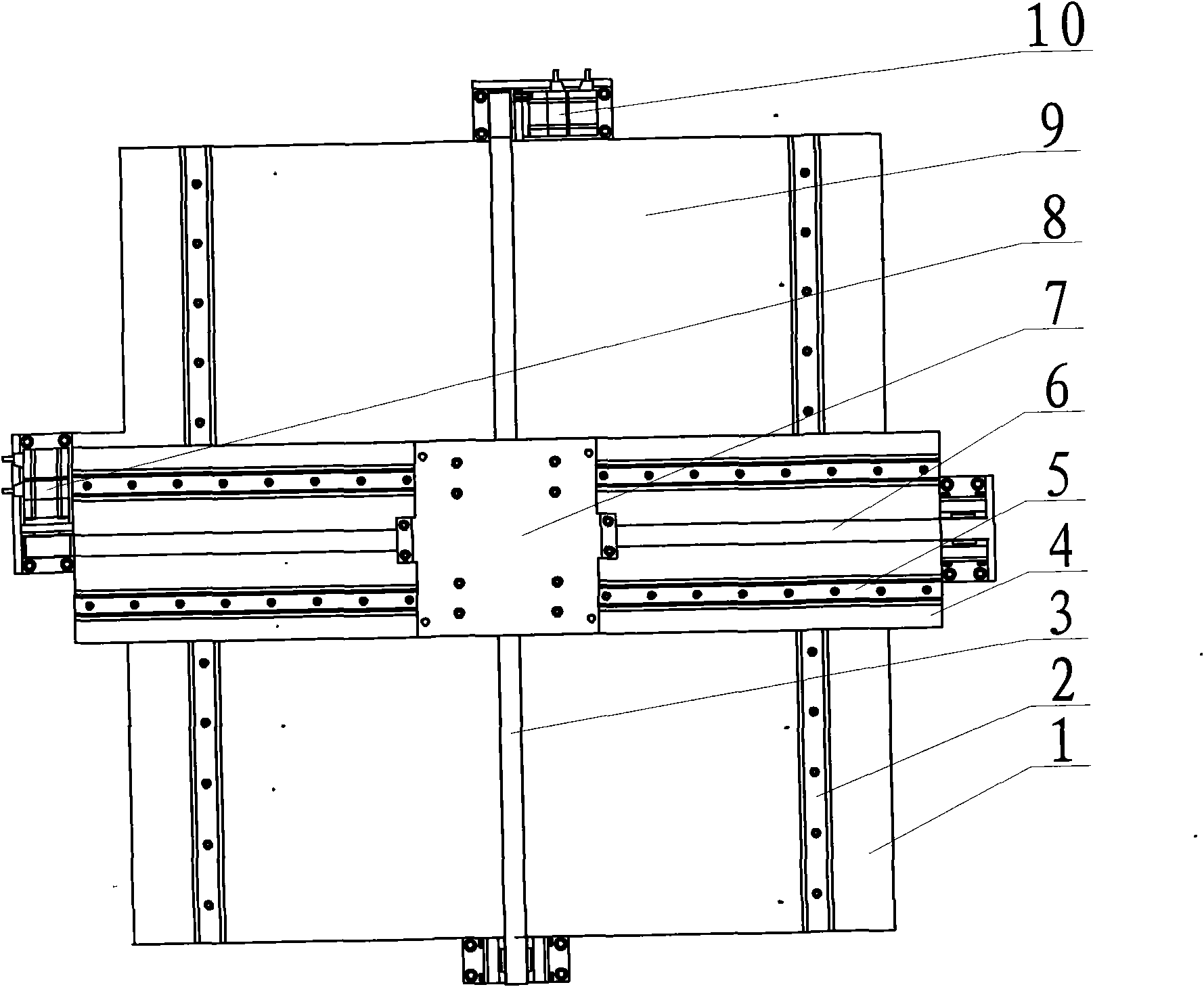
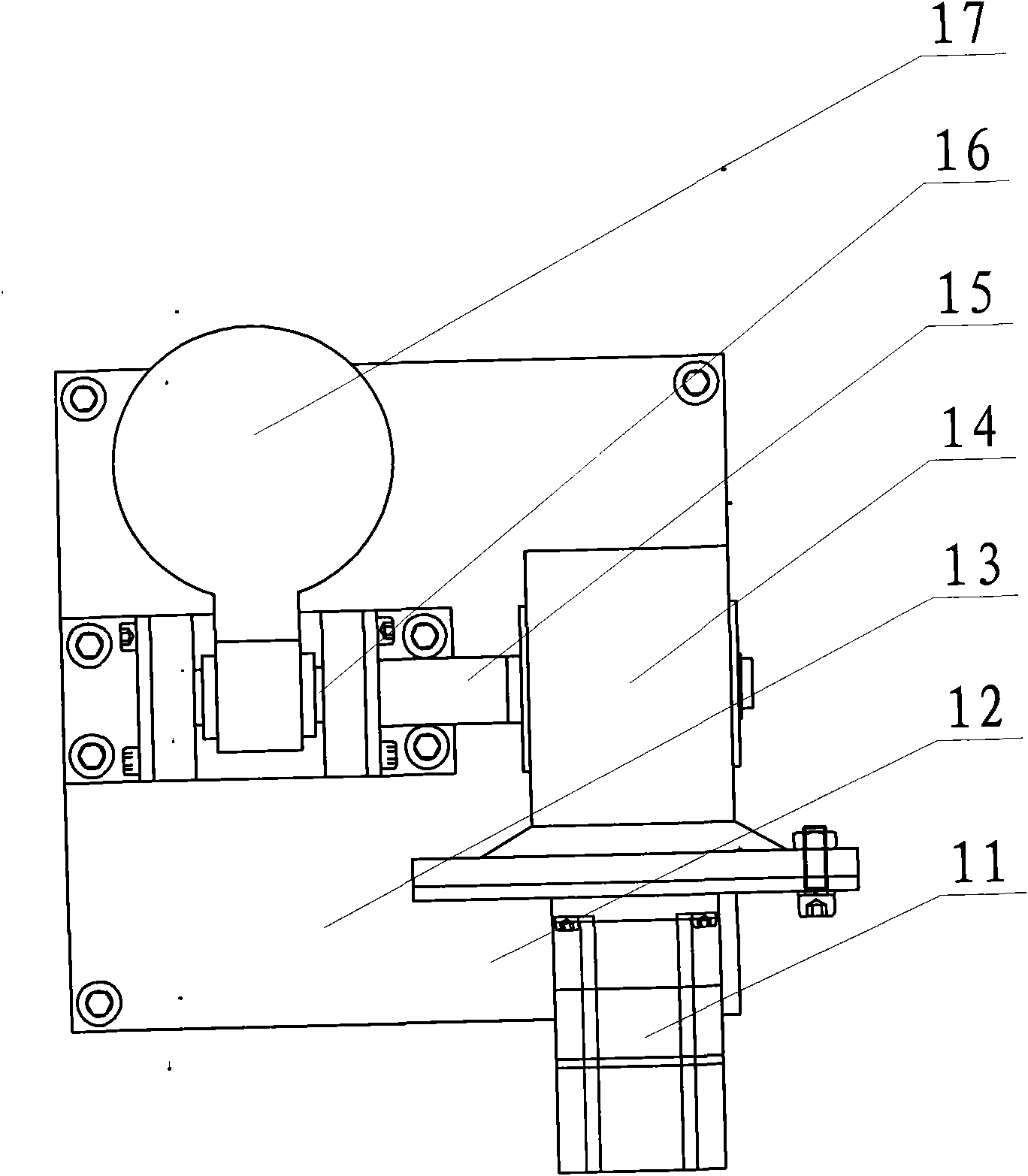
[0059] A kind of shuttlecock robot comprises running track part 1, batting part 12 and vision part, as figure 1 As shown, the described running track part 1 comprises a base 9 with a longitudinal track 2, on the longitudinal track 2, a longitudinal slider 4 with a transverse track 5 movable on the longitudinal track 2 is arranged, on the longitudinal slider 4 The transverse track 5 is provided with a transverse slider 7 that can move on the transverse track 5; between the longitudinal track 2 and the transverse track 5, a longitudinal synchronous belt 3, a transverse synchronous belt 6, a longitudinal synchronous belt 3, and a transverse synchronous belt are respectively arranged. Belt 6 links to each other with longitudinal control motor 10, lateral control motor 8 of base 9 sides respectively; figure 2 As shown, the described batting part 12 comprises the base plate 13 that is fixed with the racket 17, and the shaft 16 of the racket 17 is connected with the shaft 15 of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More