

Mobile robot and path planning method thereof for manipulating target objects
一种机器人、目标物的技术,应用在寻找目标的控制、仪器、机动车等方向,能够解决机器人效率难以提升、多电力、无法自动避开障碍物等问题,达到避免盲目移动的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
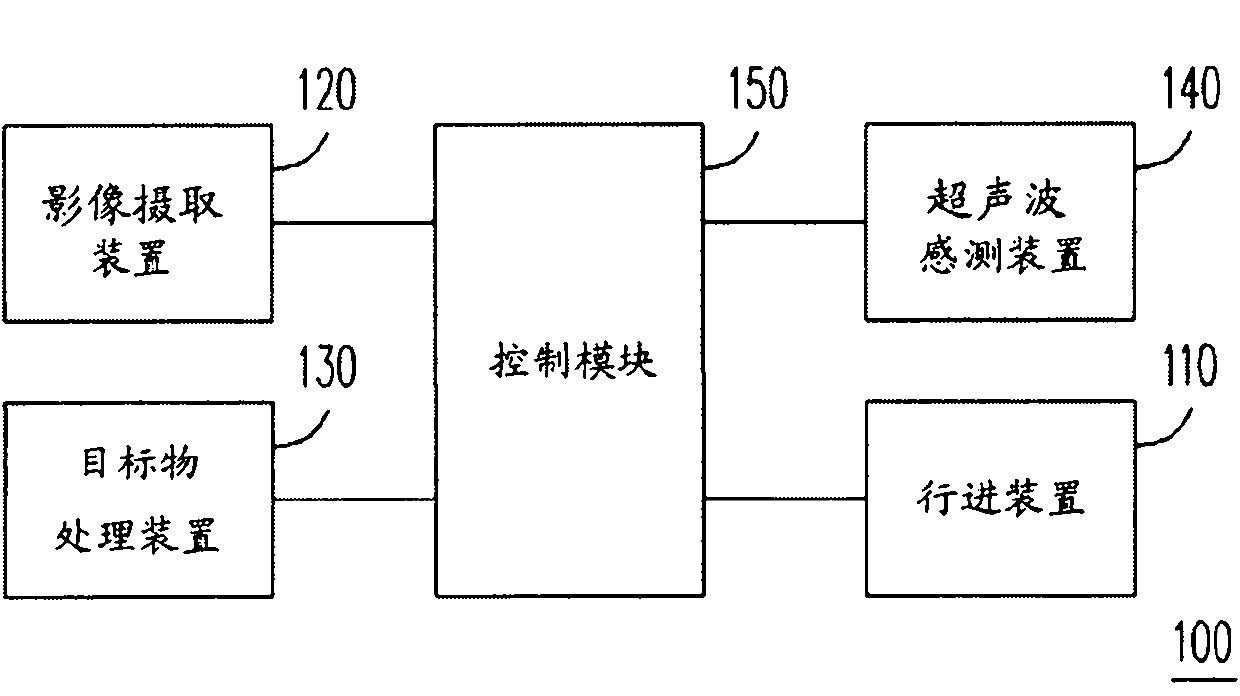
[0048] figure 1 is a block diagram of a mobile robot according to an embodiment of the present invention. see figure 1 , the mobile robot 100 includes a traveling device 110, an image capturing device 120, an object processing device 130, an ultrasonic sensing device 140, and a control module 150; The wheel set that the mobile robot 100 turns to, and the motor that controls the rotation speed of the above wheel set. The image capture device 120 is, for example, a web camera (webcam), which can adjust the angle up and down and continuously capture images when the mobile robot 100 is moving.
[0049] The object processing device 130 is used to perform specific processing actions on several objects in the space when the mobile robot 100 is walking in the space; wherein, the space may be a room or a court, etc., and its scope is not limited here , and the space can be divided into edge area and central area. The ultrasonic sensing device 140 is used to detect environmental inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More