

Myoelectricity artificial hand grip strength controlling method based on fuzzy controller
A fuzzy controller and control method technology, applied in the field of myoelectric prosthetic hand grip control, can solve problems such as easy deformation, difficulty in adapting to normal life, and inaccessibility of disabled people, so as to avoid damage to items, restore normal life, and pick up items Fast and Flexible Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment
[0014] A kind of myoelectric prosthetic hand grip control method based on fuzzy controller, comprises the following steps:
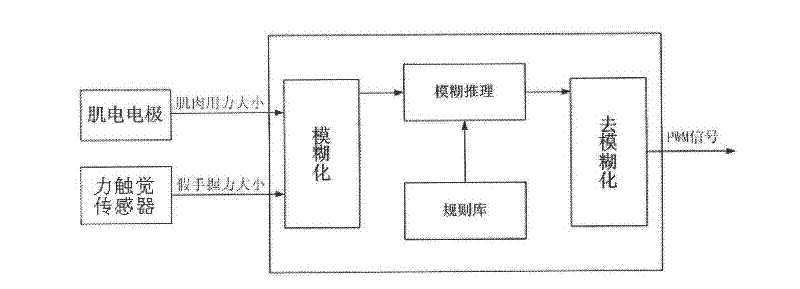
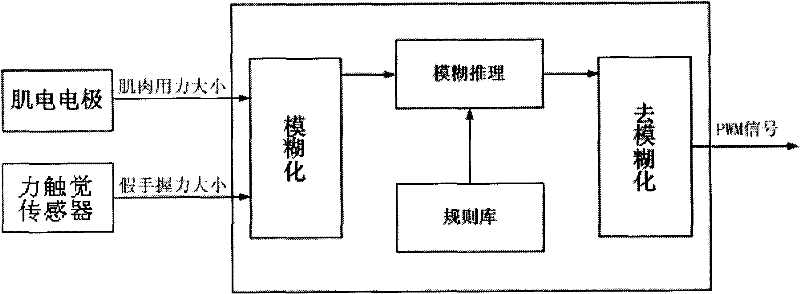
[0015] Step 1 Use the myoelectric electrode to collect the signal of the muscle force, and then use the force tactile sensor to collect the signal of the artificial hand grip.
[0016] Step 2 preprocesses and blurs the collected signals of muscle exertion and artificial hand grip strength,
[0017] Step 3 uses fuzzy rules to perform fuzzy inference on the fuzzy output result obtained in step 2, and finally defuzzifies the result of fuzzy inference to obtain a driving signal for controlling the grip force of the myoelectric prosthetic hand.
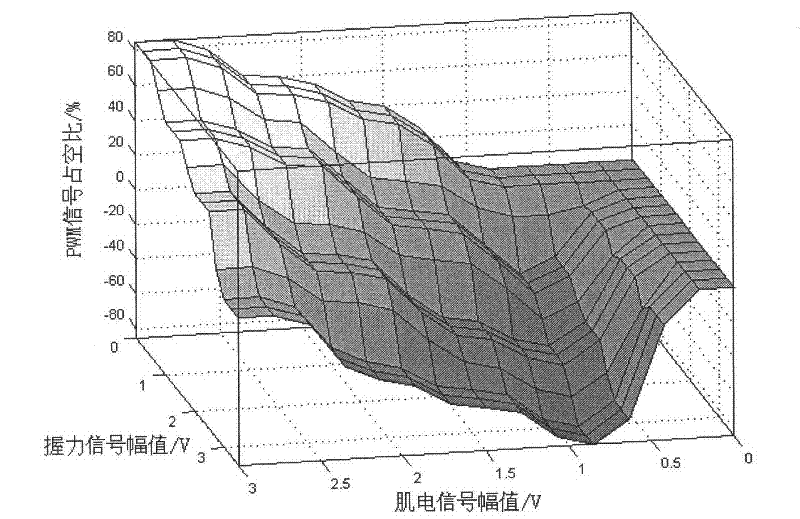
[0018] The amplitude range of the myoelectric signal accepted by the fuzzy controller is 0V~3V, the amplitude range of the grip signal is 0V~3.3V, and the output is used to drive the PWM si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More