

Motor vehicle stream-oriented intersection traffic pre-signal control method
An intersection and signal control technology, applied in the direction of controlling traffic signals, etc., can solve problems such as the decrease of the traffic capacity of the intersection, the adjustment of the timing plan of the pre-signal and the main signal, and the congestion of motor vehicles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
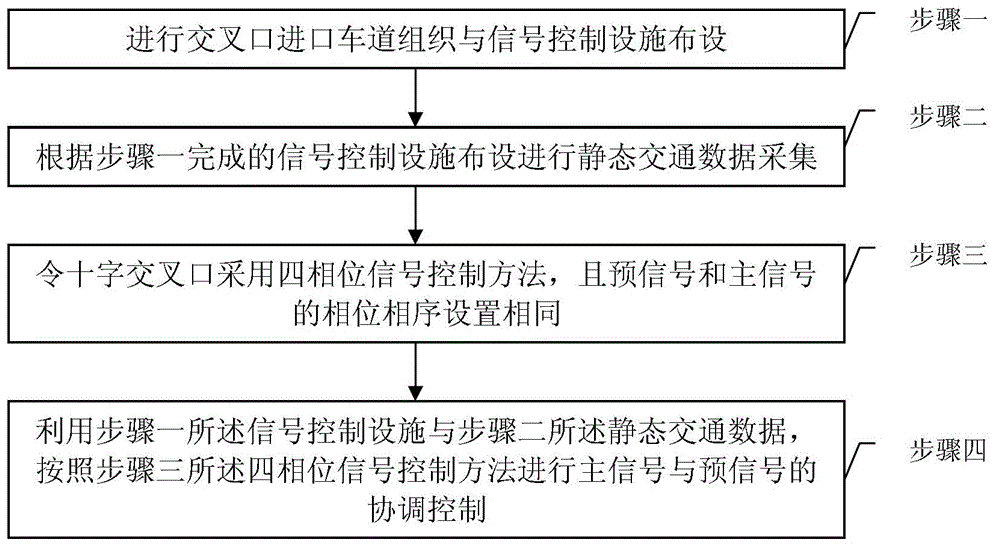
[0020] Specific implementation mode one, combination Figure 1-Figure 3 This specific embodiment is described. A traffic pre-signaling control method for intersections facing motor vehicle flow, which includes the following steps:
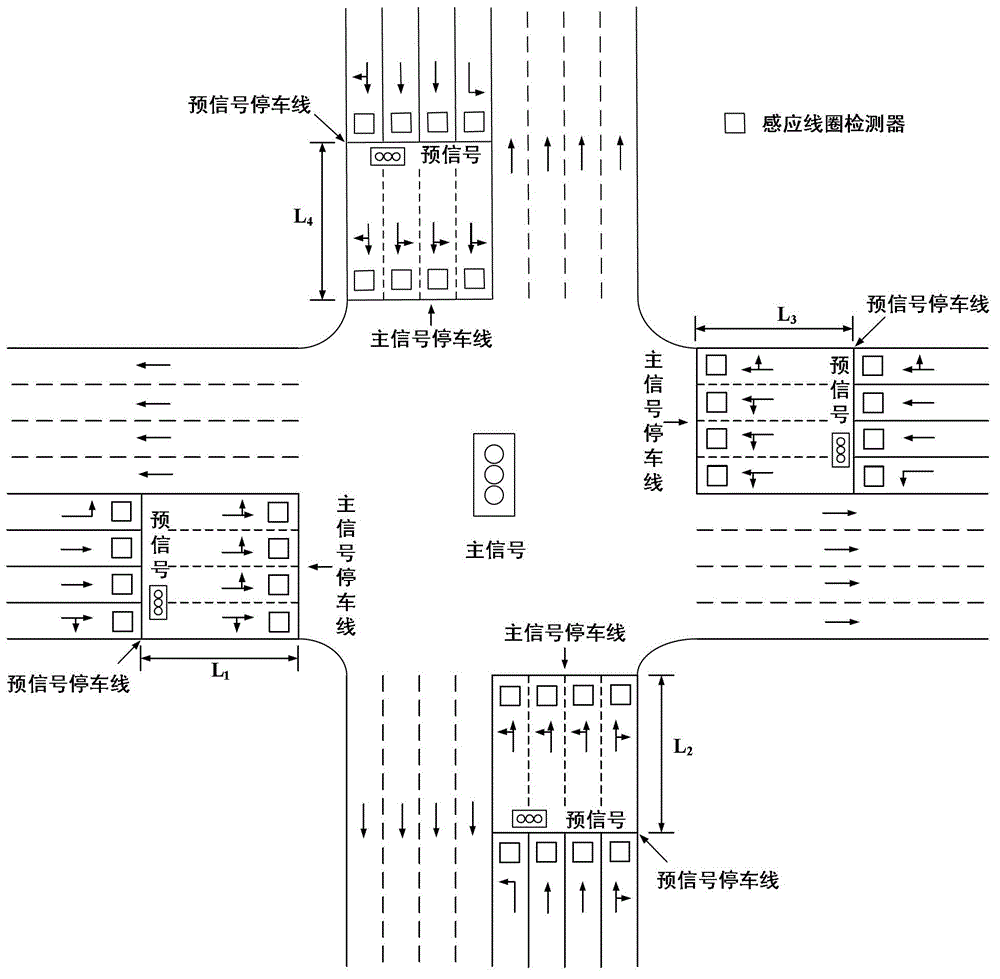
[0021] Step 1: Carry out the organization of the entrance lanes at the intersection and the layout of signal control facilities;
[0022] Step 2: Perform static traffic data collection according to the signal control facility layout completed in Step 1.
[0023] The static traffic data includes the width of each lane of the intersection, the saturated traffic flow rate of each entrance lane of the intersection, and the green light loss time of each phase of the intersection;
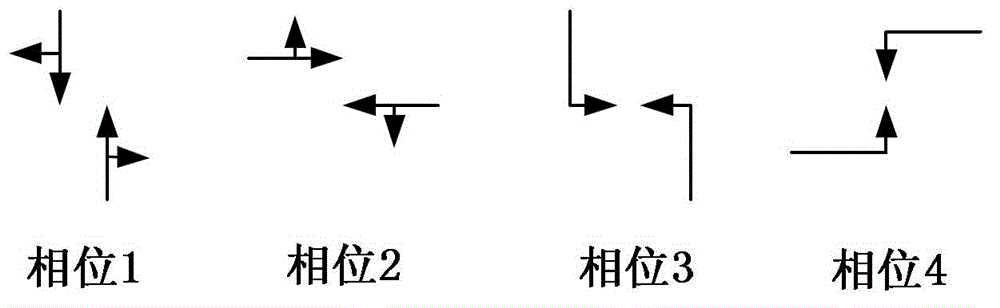
[0024] Step 3: Use the four-phase signal control method at the intersection, and the phase sequence setting of the pre-signal and the main signal are the same;
[0025] Step 4: Use the signal control facility described in step one and the static traffic data described in step two to p...
specific Embodiment approach 2
[0026] Specific embodiment two, this specific embodiment is different from specific embodiment one in the step one: the process of organizing the intersection entrance lane and laying out signal control facilities is:
[0027] Step 1A: Determine the length of the waiting area in each entrance direction of the intersection; the waiting area is the area between the main signal stop line and the pre-signal stop line;
[0028] Length of waiting area in the i-th entrance direction L i for:
[0029] L i =1.2×L imax +20
[0030] Unit: m, where:
[0031] L i max = max ( C 0 X q ‾ il , C 0 X q ‾ is ) X L ‾
[0032] Where C 0 It is the maximum period of the intersection during peak hours under the timing control mode, the unit is s;
[0033] It is the average headway distance of motor vehicles under queuing conditions, the unit is m;
[0034] It is the ratio of the flow of left-turning motor vehicles in the i-th entrance direct...
specific Embodiment approach 3
[0045] Specific implementation mode three, combination Figure 4 This specific embodiment is described. The difference between this specific embodiment and the second embodiment is the step four: use the signal control facility described in step one and the static traffic data described in step two to perform main signal and pre-signal according to the four-phase signal control method described in step three The process of coordinated control is:
[0046] Step 4A: Clear the initial data of the induction coil detector;
[0047] Step 4B: The main signal turns on sequentially according to the preset phase sequence, and the pre-signal turns on according to the main signal sequence;
[0048] The corresponding relationship of the green light phase is: when the green light of the i-th phase of the main signal starts to light up, the i-th phase of the pre-signal and the green light of the j-th phase start to light synchronously;
[0049] j=mod(i+1,4)+1
[0050] i=mod(i,4)+1
[0051] mod is the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More