

Walking type chassis of symmetrical type multi-freedom-degree four-wheel all-wheel-drive walking type excavator
A degree of freedom, symmetrical technology, used in earthmoving machines/shovels, motor vehicles, fluid steering mechanisms, etc., can solve the problems of high manufacturing process requirements, single function, reduced overall efficiency, etc., to achieve the up and down swing range. Large, high self-sustaining capacity in the field, and the effect of improving oil storage capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with accompanying drawing.
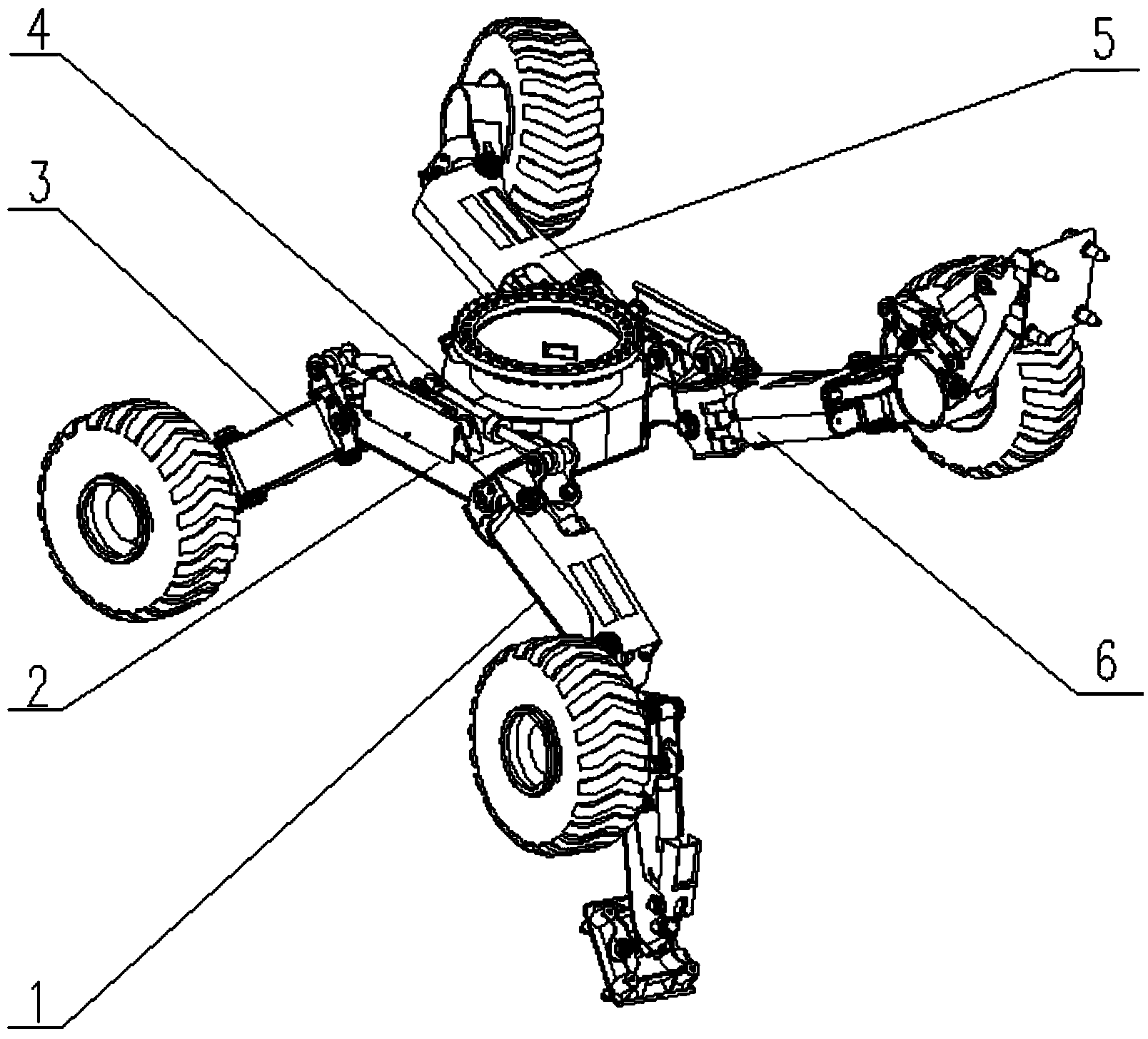
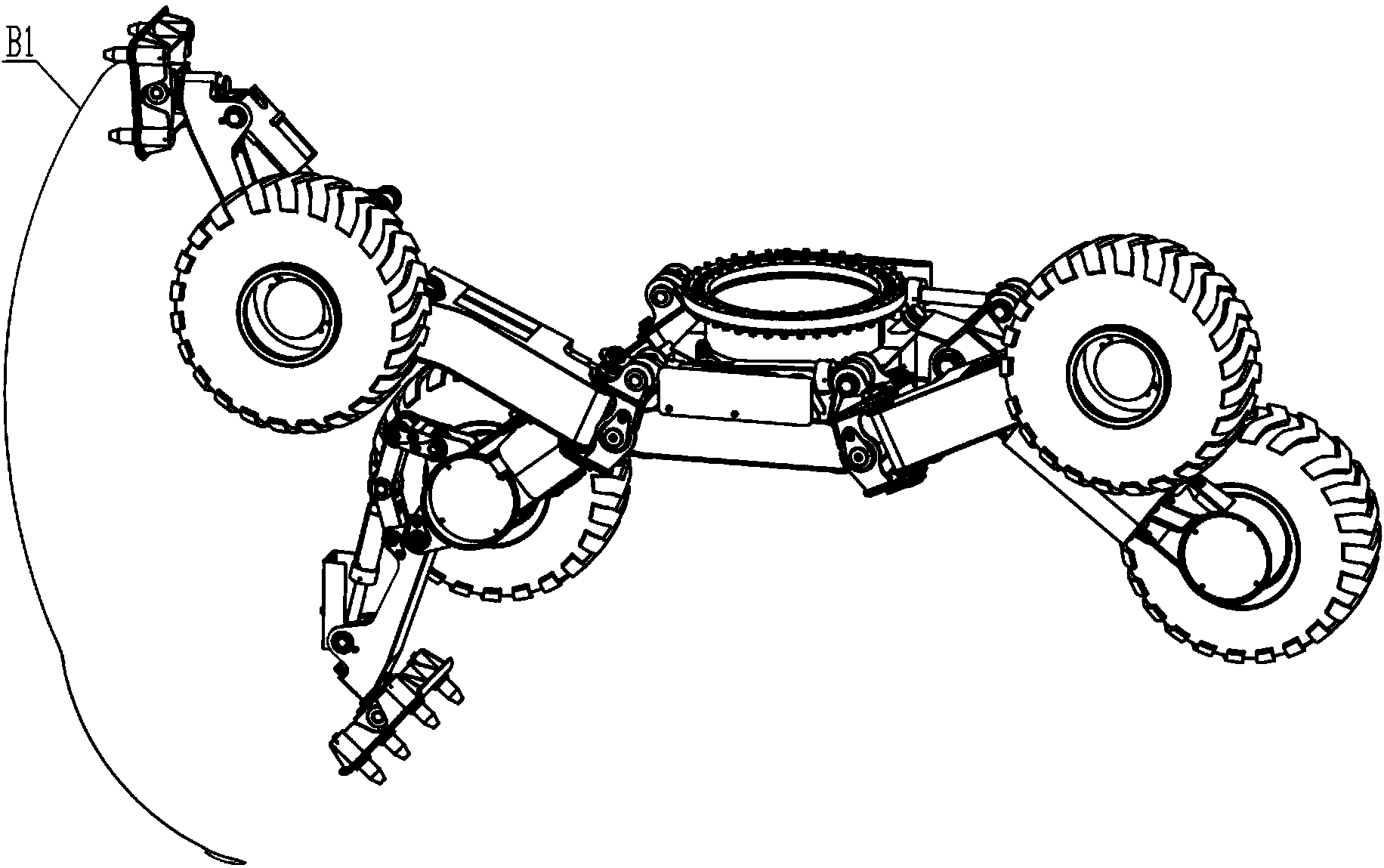
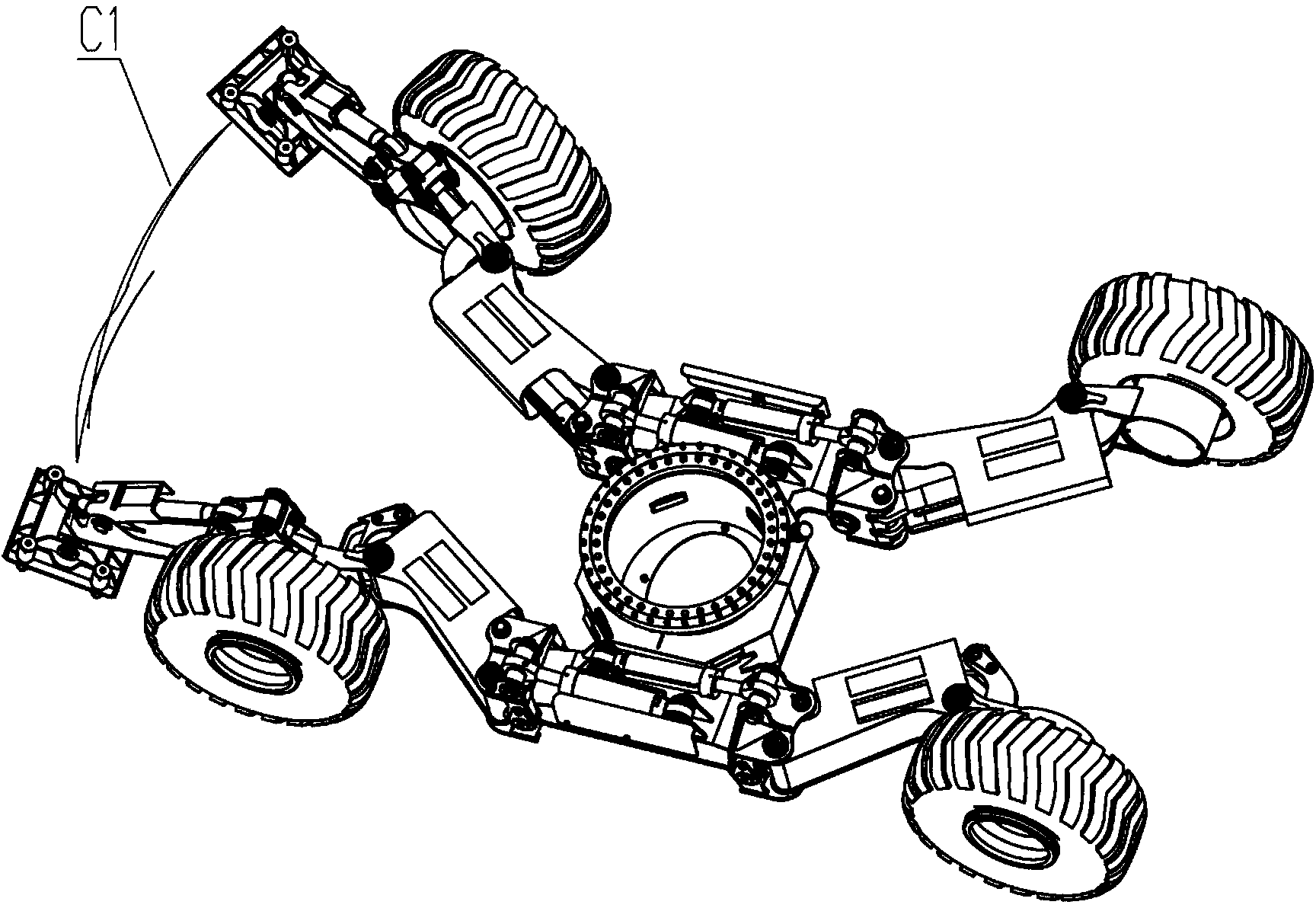
[0059] Such as Figure 1 to Figure 7 As shown, the walking chassis of the symmetrical multi-degree-of-freedom four-wheel full-drive walking excavator includes a right front leg 1, a slewing base 2, a right rear leg 3, a lifting cylinder 4, a left front leg 6, and a left rear leg 5. The leg 1 is structurally symmetrical with the left front leg 6, and the right rear leg 3 is structurally symmetrical with the left rear leg 5; the left front leg 6 has a set of front paw adjustment mechanism 6-14 more than the left rear leg 5; The base 2 is a symmetrical structure, consisting of a central oil tank and two side tanks arranged vertically on both sides of the central oil tank in a stepped manner. The central oil tank consists of a bottom plate 2-6, a seat ring 2-15, and two upper covers A2-22 and two surrounding boards 2-5 are surrounded; the seat ring 2-15 and the two surrounding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More