

A method for optimizing structural parameters of space manipulator based on operability
A technology of space manipulator and optimization method, applied in the direction of electric digital data processing, special data processing application, instrument, etc., can solve the problem that the calculated value deviates from the actual value, it is difficult to obtain the expression, and the flexibility of the manipulator cannot be reflected, etc. problem, to achieve the effect of simple flexibility and simple solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
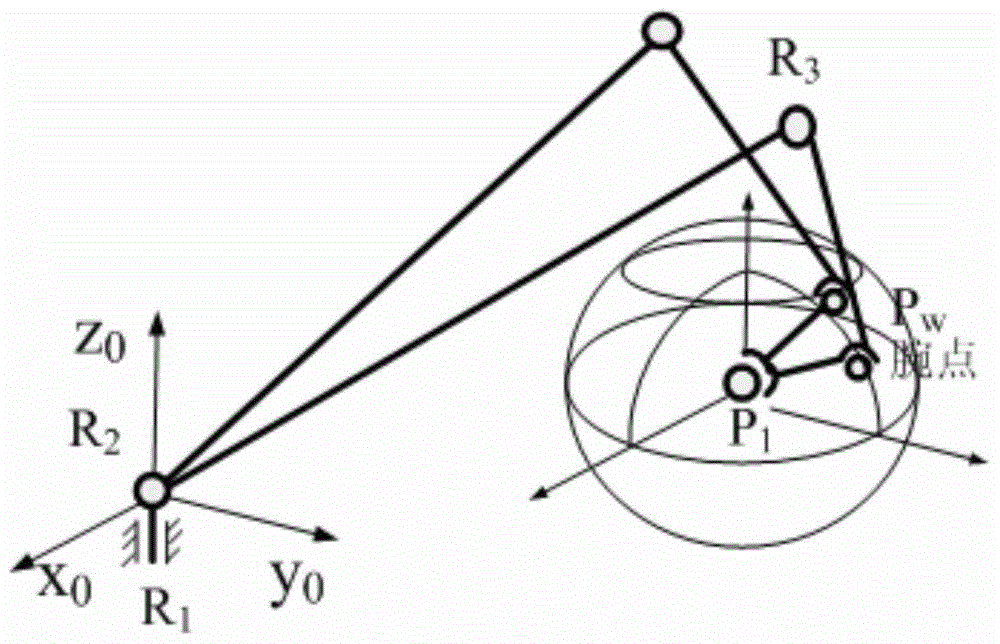
[0075] The first step is to design a space manipulator with seven degrees of freedom according to the task requirements. Every two adjacent degrees of freedom are connected by connecting rods, and the manipulator is divided into three parts: shoulder, elbow and wrist. Three degrees of freedom are assigned to the head and wrist, and one degree of freedom is assigned to the elbow. The schematic diagram of its structure is as follows Figure 4 As shown, determine the total length of the manipulator as l 0 +l 1 +l 2 +l 3 +l 4 +l 5 +l 6 +l 7 =1.87m, where l 0 rod and l 1 The rod is designed to facilitate the installation of the mechanical arm, so its length is set to l according to actual needs 0 =0.1, l 1 =0.12, so the two parameters are not optimized in the follow-up optimization, and the design value of the remaining rods is l according to the constant total length 2 =0.2,l 3 =0.4, l 4 =0.2,l 5 =0.4,l 6 =0.2, l 7 =0.25; use the forward kinematics of the manipulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More