

Balance mechanism for star surface exploration robot
A balance mechanism and surface detection technology, applied in the direction of the bolting device, can solve the problems of not being able to jump more smoothly, crashing the fuselage, and difficult to land smoothly, so as to avoid head-on-the-ground accidents, land stably, and buffer the impact of landing Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
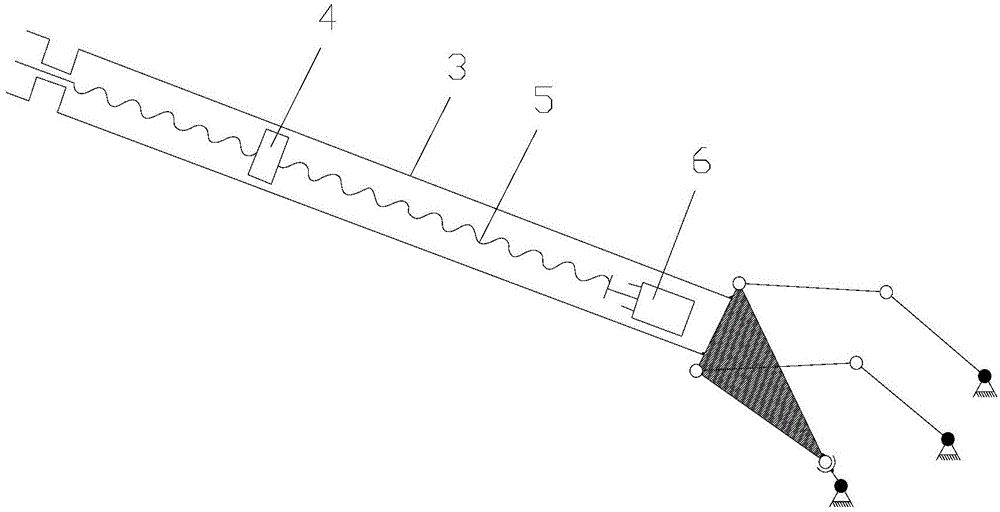
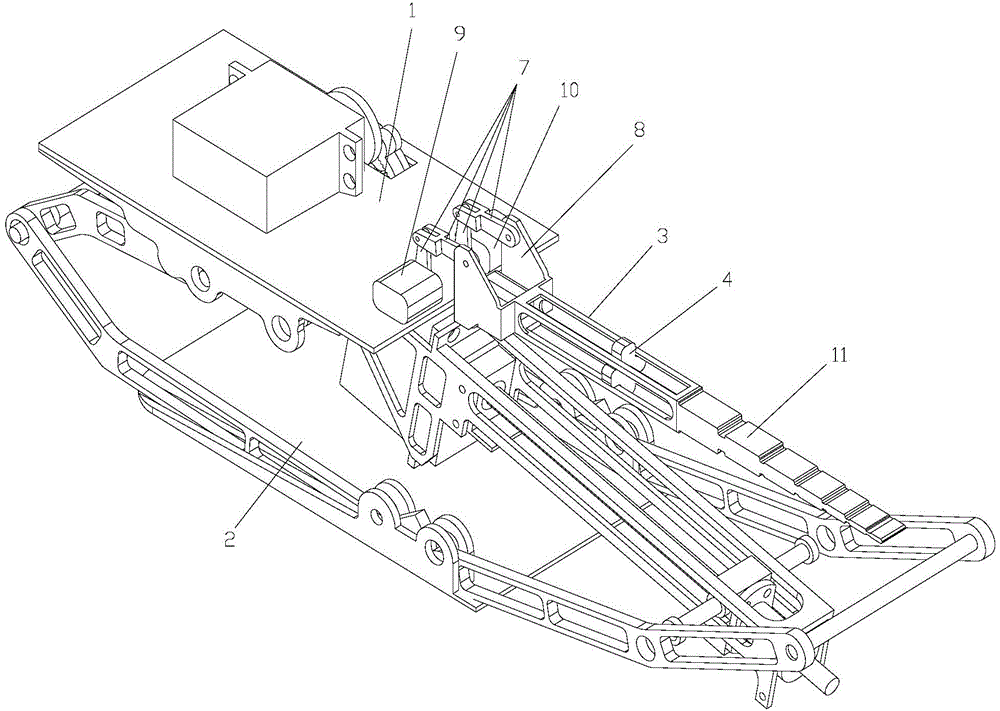
[0014] figure 1 It is a structural schematic diagram of the present invention; figure 2 It is a schematic diagram of the complete machine structure of the star surface detection robot; as shown in the figure: the balance mechanism for the star surface detection robot of the present embodiment includes a bar-shaped balance frame 3 and is connected to the balance frame 3 and the star surface detection robot body 1 The connecting drive mechanism that drives the gimbal 3 to swing between them. The gimbal 3 is like a tail, which imitates the adjustment effect of the kangaroo tail on the body posture. It can adjust the posture of the body during the flight after take-off, and effectively touch the ground through the soles of the feet to buffer the landing impact. , the ground is stable, avoiding head-on-the-ground accidents; the star surface detection robot includes a fuselage 1 and a bouncing mechanism 2 provided with a foot plate, and the fuselage 1 and the bouncing mechanism 2 h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More