

Calibration and linkage method of master-slave camera system based on rotation model
A camera, fisheye camera technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of inaccurate mapping relationship, uncertain position relationship between fisheye camera and PTZ camera, installation error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] A preferred embodiment of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
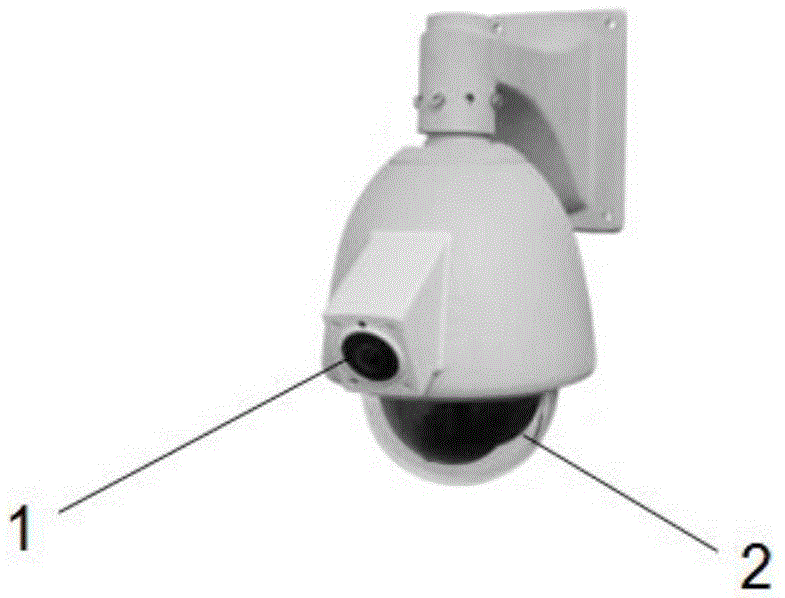
[0048] figure 1 It is a master-slave camera system. In the figure, 1 is a fisheye camera, which is located at the top, and is used to collect images in a global range, and 2 is a PTZ camera, which is located at the bottom, and is used to collect high-definition images in a local range.
[0049] In order to realize the precise linkage between the fisheye camera and the PTZ camera, the technical solution adopted by the present invention includes two aspects: a calibration process and a linkage process.
[0050] The calibration process refers to the process of obtaining the mapping relationship, including the following four steps:
[0051] The first step in the calibration process: initial adjustments. Adjust the lens zoom of the PTZ camera to 0 times (that is, the maximum field of view), and use the combination of manual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More