

Barrier escaping motion planning method based on impact degree
A motion planning and obstacle technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as exceeding the limit of sudden addition, inability to consider the limit of sudden addition, and inability to meet, and achieve the effect of small calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with the accompanying drawings, but the embodiments of the present invention are not limited thereto.
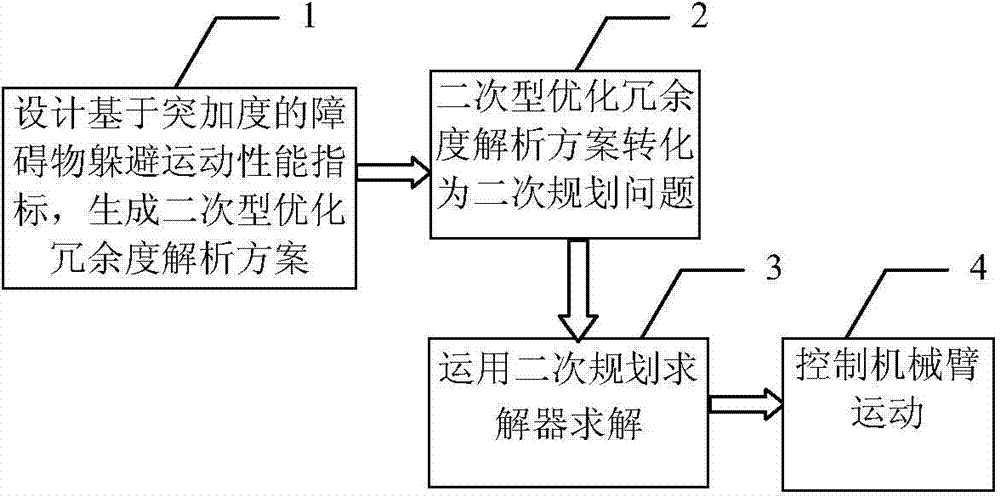
[0027] figure 1 A motion planning method for obstacle avoidance based on sudden acceleration is shown. Firstly, the obstacle avoidance motion performance index and constraints based on sudden acceleration are proposed, and a quadratic optimization redundancy analysis scheme is generated; then the quadratic optimization The redundancy analysis scheme is transformed into a quadratic programming problem; then the quadratic programming solver is used to solve it; finally, the lower computer controller controls the movement of the manipulator according to the solution result.
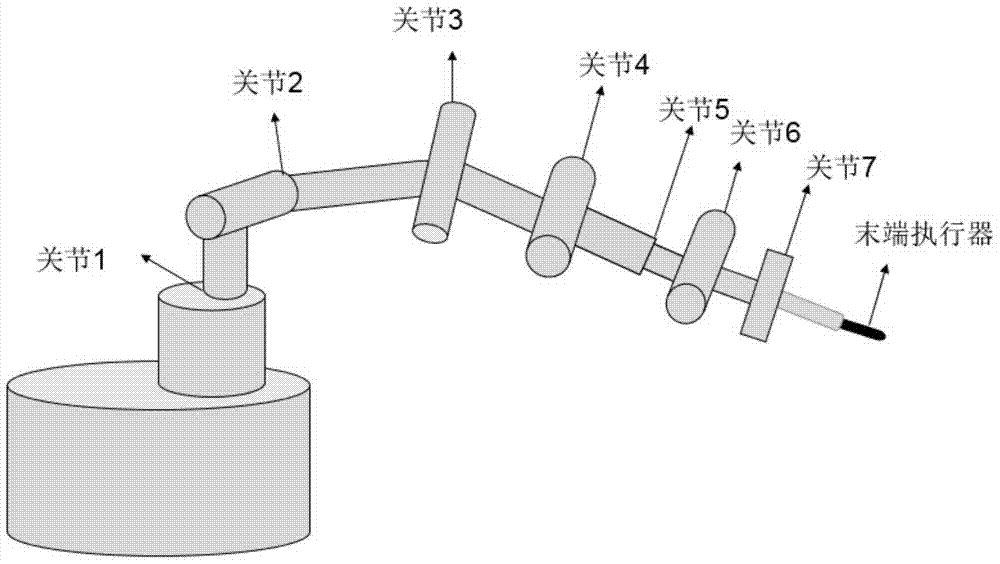
[0028] figure 2 The shown robotic arm implementing the present invention is a seven-degree-of-freedom robotic arm. The robotic arm consists of seven connecting rods, consisting of joint 1, joint 2, joint 3, joint 4, joint 5, joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More