

Dexterous hand tactile information based material classification method based on joint sparse coding
A technology of joint sparse and dexterous hands, applied in the field of material classification of joint sparse coding, can solve the problem of applying tactile information without similar methods, and achieve the effect of improving robustness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] A material classification method based on joint sparse coding of dexterous hand tactile information proposed by the present invention is described in detail in conjunction with the accompanying drawings and embodiments as follows:
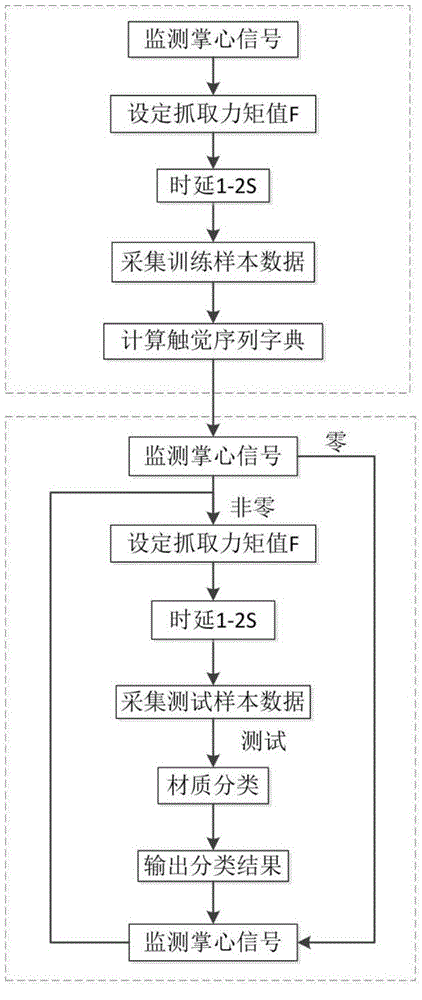
[0019] The process flow of a material classification method based on joint sparse coding of dexterous hand tactile information proposed by the present invention is as follows: figure 1 As shown, the method includes the following steps:
[0020] 1) Collect the tactile information of the object as the training sample:
[0021] Set the grasping torque value F of the dexterous hand to 2300-4000N / m, the non-zero tactile signal is Y, and the zero tactile signal is Z; put the object as a training sample on the palm S of the dexterous hand, and the palm S will monitor and collect the palm in real time When the zero tactile signal Z of the palm is detected, continue to wait for the palm signal to be monitored. When the non-zero tactile signal Y of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More