

System and method for dead reckoning correction of mobile robot based on straight intersection detection
A mobile robot, dead reckoning technology, applied in mapping and navigation, navigation through velocity/acceleration measurement, instruments, etc., can solve problems such as calibration error, poor wheel and ground contact, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] A preferred embodiment of the present invention will be described in detail below with reference to the accompanying drawings.
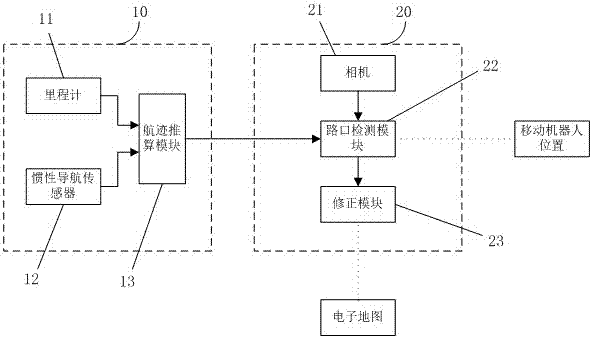
[0055] figure 1 It shows the structural principle diagram of the mobile robot dead reckoning correction system of the present invention, and the system includes a mobile robot dead reckoning unit and a dead reckoning correction unit.
[0056] The dead reckoning unit of the mobile robot includes an odometer, an inertial navigation sensor and a dead reckoning module installed on the robot; the odometer is used to collect the travel distance of the mobile robot, and the inertial navigation sensor outputs the inertial navigation of the robot in real time In the direction, the dead reckoning module is used to calculate the driving trajectory and positioning point of the mobile robot. The odometer is composed of left and right wheel speed sensors, which are respectively installed on the left and right hubs of the rear wheels of the robot, and the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More