

Mobile robot based indoor smell source positioning method
A technology of mobile robot and positioning method, applied in instruments, scientific instruments, measuring devices, etc., can solve the problem of complex odor source positioning and other problems
Inactive Publication Date: 2016-01-27
江苏拓新天机器人科技有限公司
View PDF4 Cites 16 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] In order to solve the problem of complex odor source positioning, the present invention proposes a mobile robot-based indoor odor source positioning
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
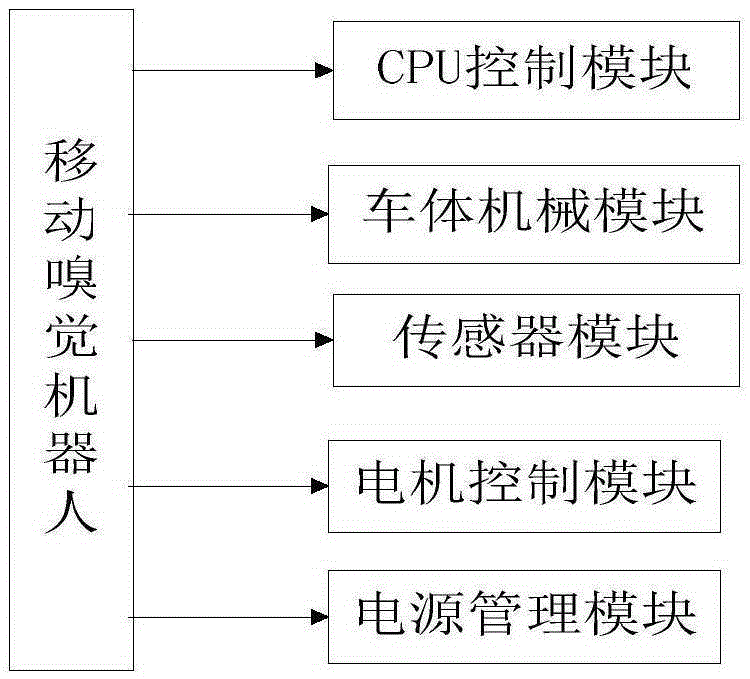
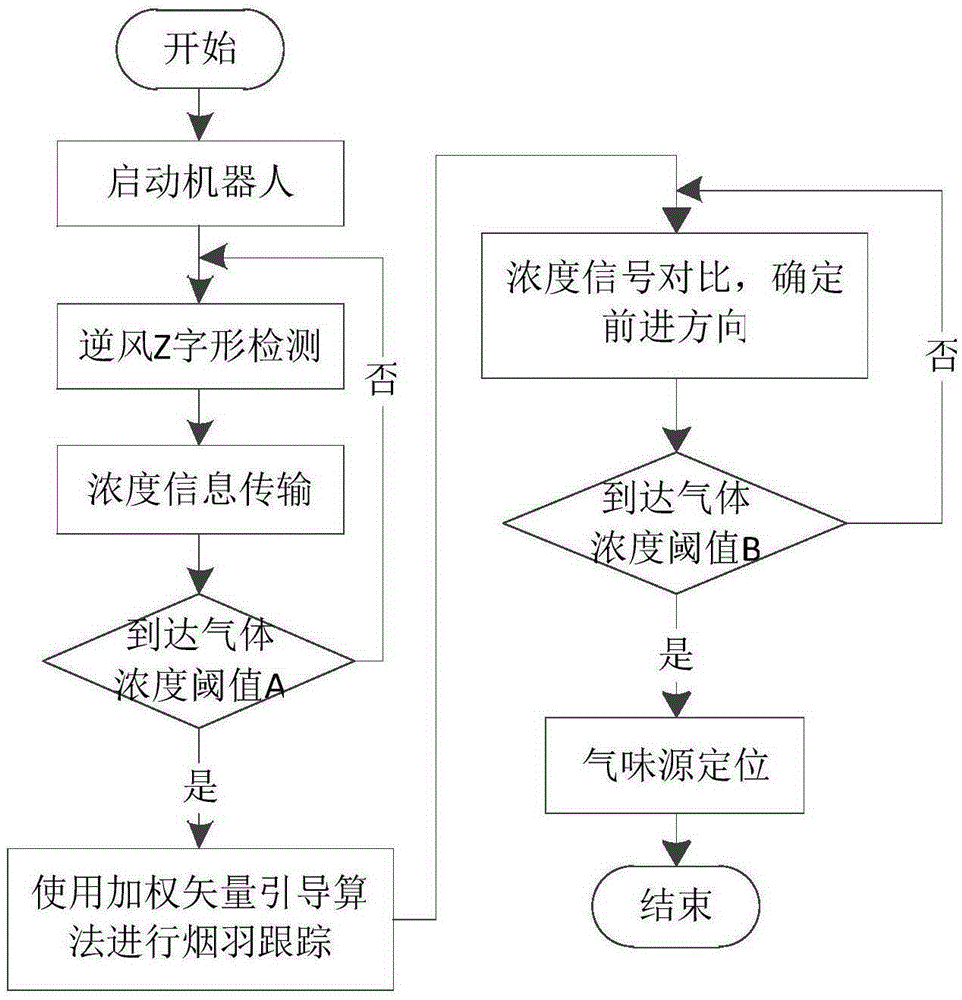
The invention discloses a mobile robot based indoor smell source positioning method. A mobile robot uses a Freescale cart as a mobile platform to establish an extension processor module, a sensor module and a power module. Smoke plume finding is performed by adopting a Z-shaped algorithm of boundary-encountered retrace, smoke plume tracking is performed by adopting an improved weighted vector guidance algorithm, and finally a smell source is confirmed by adopting a simplified quality flux divergence method. By means of the mobile robot based indoor smell source positioning method, indoor smell source positioning can be efficiently achieved.
Description
technical field [0001] The invention relates to the field of robot intelligence, in particular to a method for locating indoor odor sources based on a mobile robot. Background technique [0002] Robot odor source localization is a robot source-seeking problem, also known as robot active olfaction. Since the 1990s, some scholars have been inspired by the living habits of natural organisms relying on the sense of smell to find a mate, search for food, and avoid natural enemies. They combine odor sensors with mobile machines to "actively" locate the odor source. It is the process of using mobile robots to actively discover and track smoke plumes and determine the location of the odor source. A plume is the trail of odor / gas molecules released from the source, which spreads like a feather in the air under the action of the wind. The application of odor source location widely exists in production and life, especially in harsh environments, toxic (polluted), explosive and flamma...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01N27/00
Inventor刘新华胡梦珂赵雪林陈传省张涛赵金海
Owner江苏拓新天机器人科技有限公司