

Multi-target tracking method through multi-search particle probability hypothesis density filter
A probability hypothesis density, multi-target tracking technology, applied in the field of radar tracking of multiple targets, can solve the problem of target loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
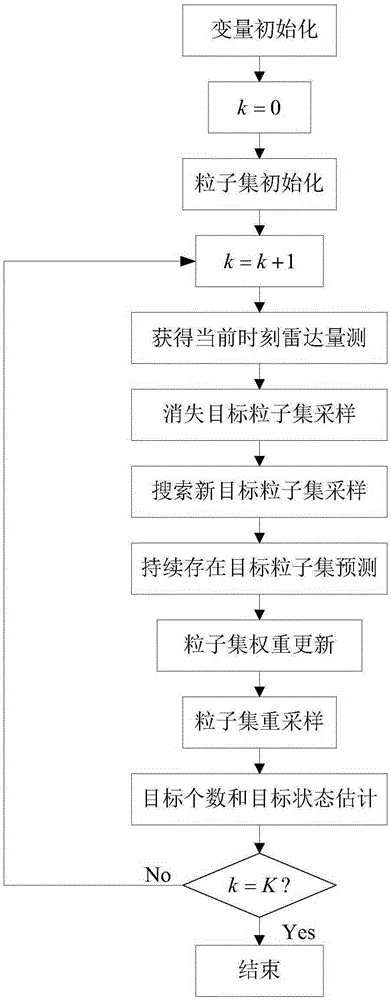
[0065] The MS-PPHDF method proposed by the present invention will be described in detail below in conjunction with the accompanying drawings.
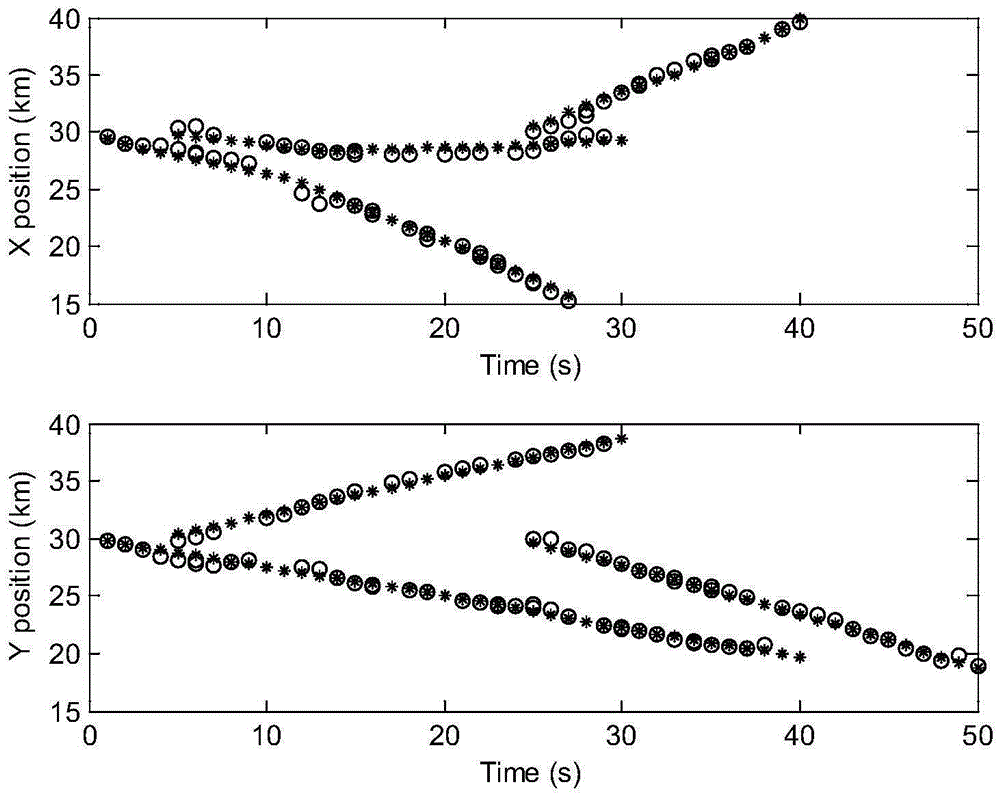
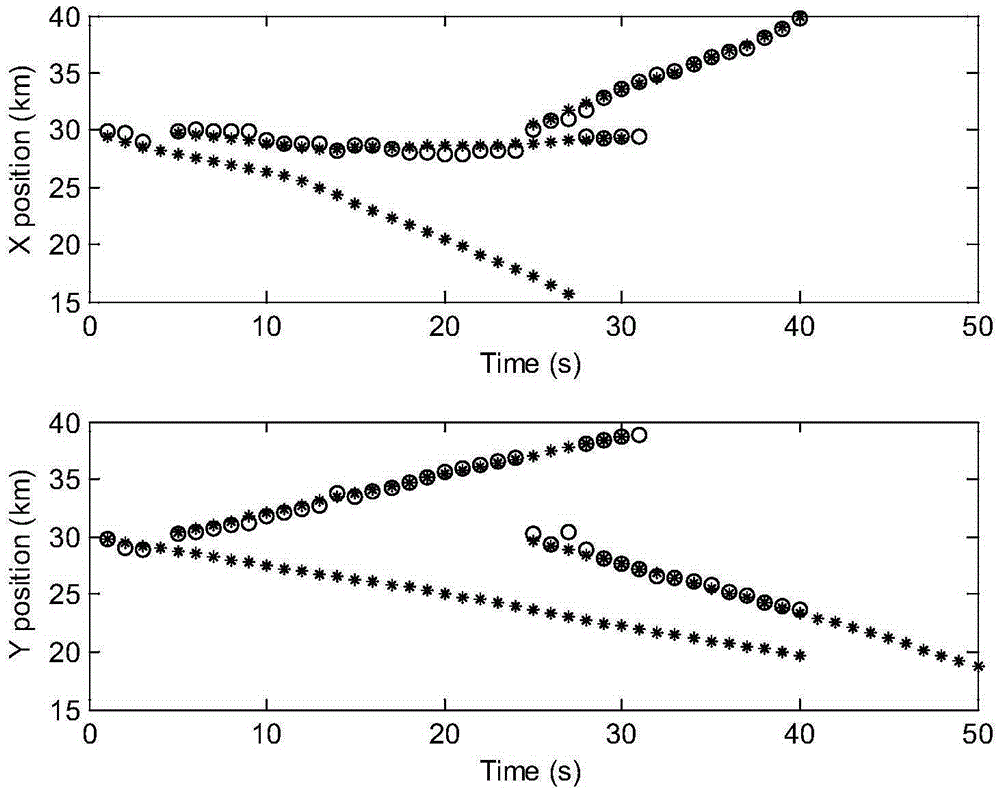
[0066] Without loss of generality, a two-dimensional simulation scene is set, the monitoring area S=[-60km, 60km]×[-60km, 60km], and the total simulation time K=50s. Assuming that the target can appear and disappear randomly in the monitoring area, the average target appearance probability γ k = 0.2, the initial distribution D of the target appearance 0 subject to mean x 0 and covariance Q b The normal distribution of , here take x 0 =[30km0.2km / s30km-0.1km / s] T and Q b =diag([1km0.5km / s1km0.5km / s]), the standard deviation of process noise in x direction and y direction is both 0.01km, the probability of target persistence is e k|k-1 = 0.95 and has nothing to do with the target state. The radar is located at point (0km, -10km), and the detection probability is P D =0.75, the average number of clutter per frame is λ k = 4, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More