

Global calibration method of distributed multi-camera system
A calibration method and multi-camera technology, applied in the field of photogrammetry, can solve problems such as accumulated errors and achieve the effect of overcoming image noise
Active Publication Date: 2016-07-27
BEIHANG UNIV
View PDF3 Cites 11 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
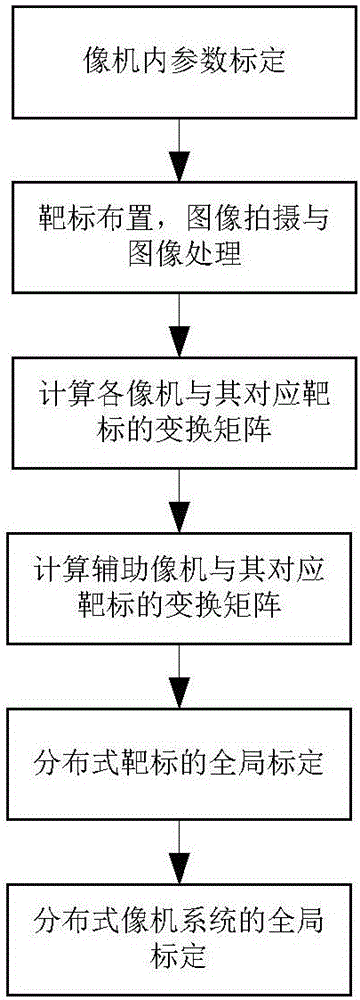
[0005] The purpose of the present invention is to propose a global calibration method for a distributed multi-camera system in order to solve the problem of accumulated errors caused by multiple coordinate transformations in the global calibration of a distributed multi-camera system
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
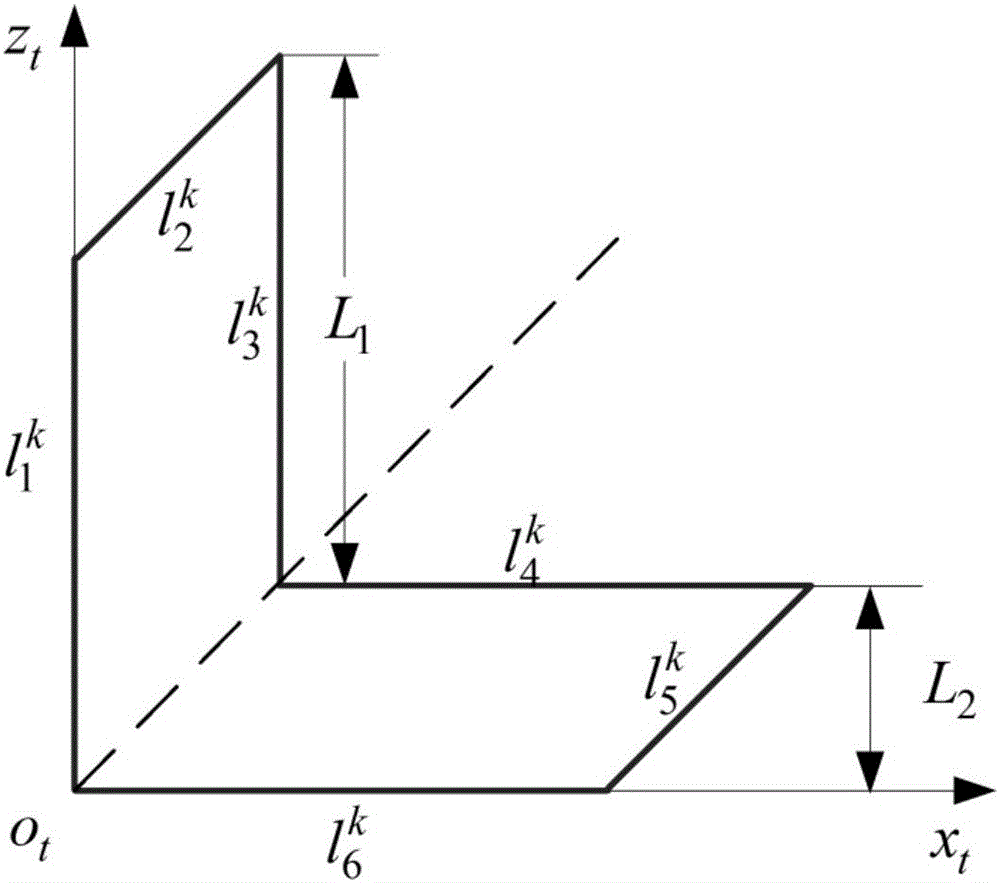
[0100] In this implementation example, the distributed multi-camera system consists of 8 cameras, and the position coordinates of the cameras in the ECF and the Euler angles with the ECF are shown in Table 1. Target size L 1 =500mm, L 2 =200mm, obtained by calculation The error is used to evaluate the accuracy of the global calibration method proposed in the present invention.
[0101] Table 1 Camera position and attitude
[0102]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
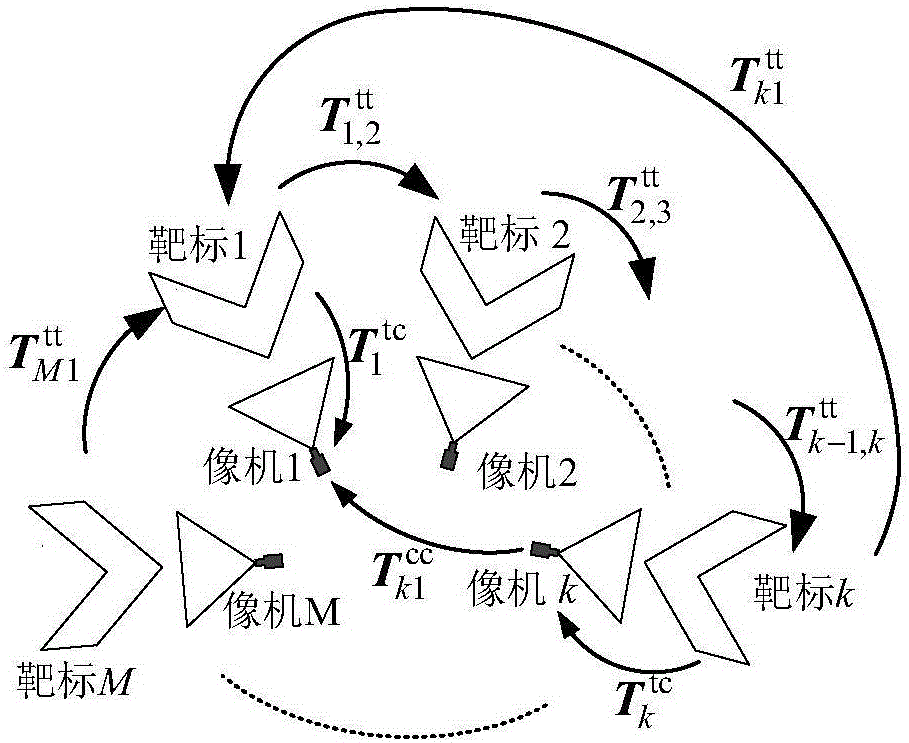
The invention discloses a global calibration method of a distributed multi-camera system. The global calibration method includes the steps of using two-dimensional calibration targets formed by two groups of mutually orthogonal parallel straight lines to obtain relative position and attitude initial values through vanishing line equations and known target geometric dimensions based on vanishing point and vanishing line estimation cameras and relative positions and attitudes of the targets, and seeking minimum values of re-projection error functions so as to obtain optimum values of the cameras and the calibration targets; using auxiliary cameras to shoot adjacent target images to obtain a coordinate transformation matrix between the adjacent targets, seeking relative position and attitude initial values of the calibration targets relative to a reference target by an increment method and obtaining optimum values of transformation matrixes of the calibration targets relative to the reference target by seeking minimum values of re-projection error functions based on closed image sequences; through corresponding coordinate transformation, seeking optimum values of the transformation matrixes of the cameras relative to a reference camera to conduct global calibration of the distributed multi-camera system.
Description
technical field [0001] The invention belongs to the technical field of photogrammetry of optical systems, in particular to a global calibration method for a distributed multi-camera system. Background technique [0002] The optical measurement system has the advantages of flexibility, variety and high precision. As a typical optical measurement system, the distributed multi-camera system has a large field of view and can fuse the images acquired by the multi-camera, so it is widely used in visual measurement, object detection and other fields. The global calibration of the multi-camera system is to obtain the relative position and attitude relationship between the cameras through a certain method, so that the coordinate system of the multi-camera is integrated into the global coordinate system, which is one of the prerequisites for optical measurement. [0003] At present, the commonly used multi-camera global calibration methods are: calibration method based on precision i...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06T7/00
CPCG06T2207/10016G06T2207/10052
Inventor吴晓龙吴森堂
OwnerBEIHANG UNIV