

Method and device applied to indoor location of mobile robot
A mobile robot and indoor positioning technology, applied in the direction of instruments, image data processing, closed-circuit television system, etc., can solve the problems of surrounding environment interference, sensor accuracy limitation, position and heading error, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present disclosure will be described more fully hereinafter with reference to the accompanying drawings, in which embodiments of the disclosure are shown. These embodiments may, however, be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these examples are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the disclosure to those skilled in the art.
[0024] Various implementations of the present invention will be described in detail below by way of examples with reference to the accompanying drawings.
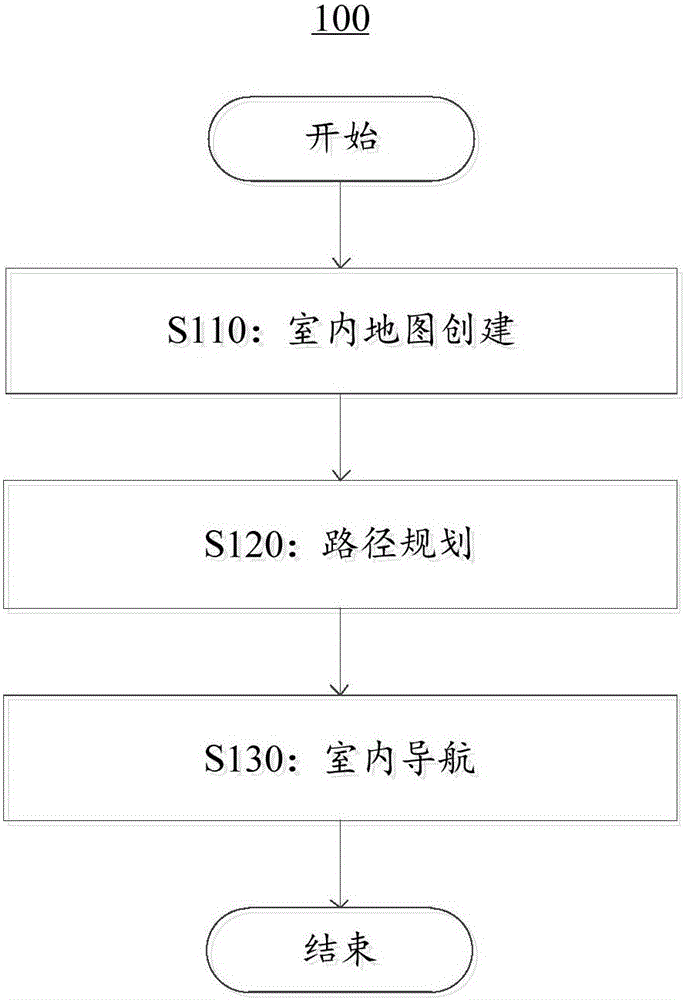
[0025] figure 1 A flowchart illustrating a method 100 of prior art indoor positioning and navigation technology.
[0026] Step S110, creating an indoor map. The creation of indoor maps can use methods such as tape measure and laser rangefinder to measure the length and thickness of the wall and the position relative to the origin of the coordinates...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More