

Parameter identification based multi-motor servo system synchronization and tracking control method
A servo system and parameter identification technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering the precise tracking of system output, and achieve the effect of ensuring fast synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to better illustrate the purpose and advantages of the present invention, the method of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
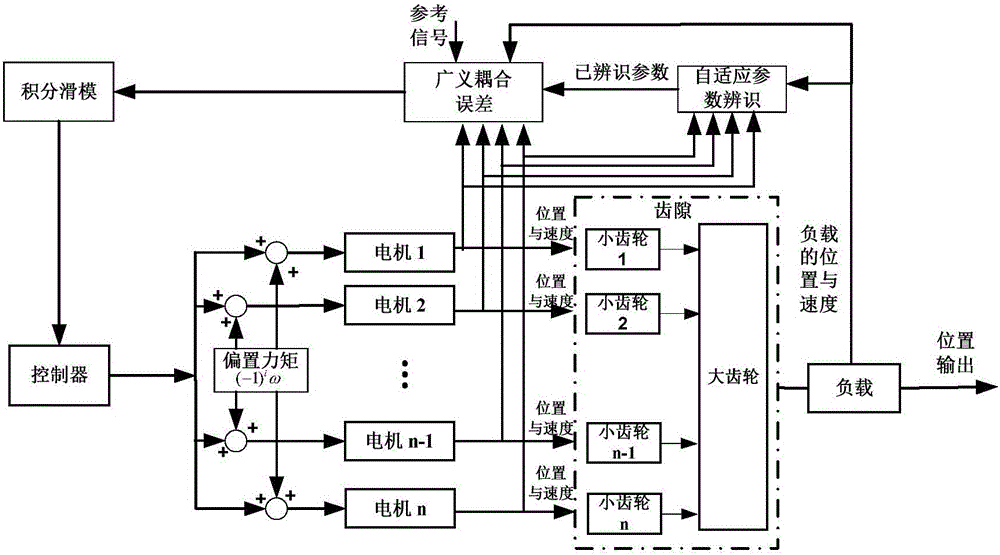
[0088] A method for synchronizing and tracking control of a multi-motor servo system based on parameter identification, comprising the following steps:
[0089] Step 1, analyze the multi-motor drive servo system with unknown parameters, and establish the mathematical model of the multi-motor drive servo system with unknown parameters according to the mechanism modeling method, according to the structure and physical laws of the motor. details as follows:
[0090] According to the mechanism modeling method, according to the structure and physical laws of the motor, the mathematical model of the multi-motor drive servo system with unknown parameters is established as follows:
[0091]
[0092] Among them, θ mi (i=1,2,…n) and θ l represent the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More