

Six-axis industrial robot wrist capable of swinging spatially
An industrial robot and swing mechanism technology, applied in the field of robotics, can solve the problem that the wrist body cannot swing arbitrarily, and achieve the effect of flexible operation of the wrist body
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
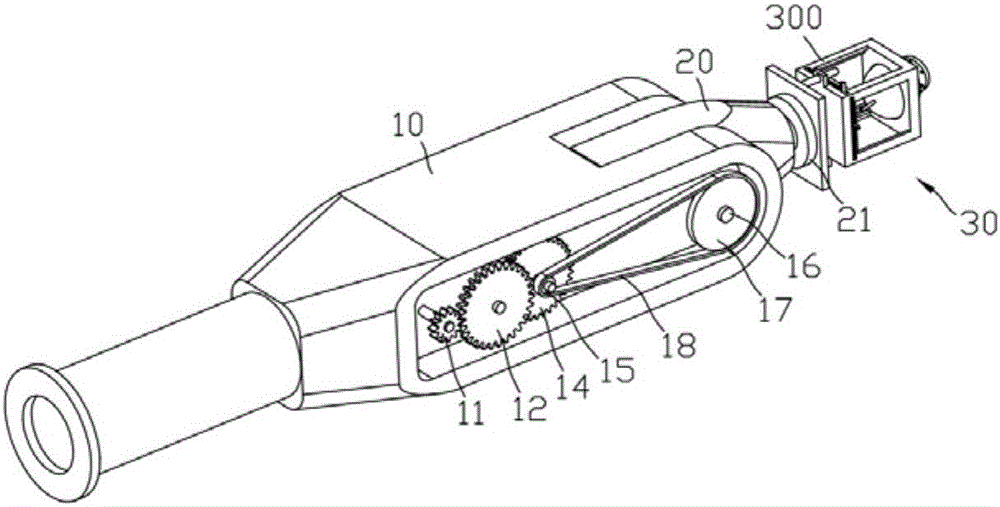
[0026] Such as figure 1 , a wrist of a six-axis industrial robot capable of swinging in space, comprising an arm 10, a swing arm 20 pivotally connected to the front end of the arm, a first drive unit for driving the swing arm to swing, a rotating hand 30 pivotally connected to the front end of the swing arm, and a driving rotation The second drive unit for hand rotation; the center line of the swing arm when swinging is perpendicular to the rotation center line of the rotating hand. Wherein, a concave opening is defined at the front end of the arm 10 , and the swing arm 20 is pivotally connected in the concave opening.
[0027] Such as figure 1, the first driving unit includes a first motor installed on the arm 10, a first transmission unit that connects the first motor and the swing arm; Gear 12 and the third gear, the fourth gear 14 and the first synchronous pulley 15 that are pivoted on the arm and coaxially arranged, the third shaft 16 that is pivoted on the arm, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More