

Multi-unit linear driving three-range-of-motion loading robot
A linear drive, linear drive technology, used in loading/unloading, manipulator, transportation and packaging, etc., can solve the problems of weak load capacity and poor dynamic performance, and achieve the effect of improving bearing capacity, reducing energy consumption and high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below through the accompanying drawings and embodiments.
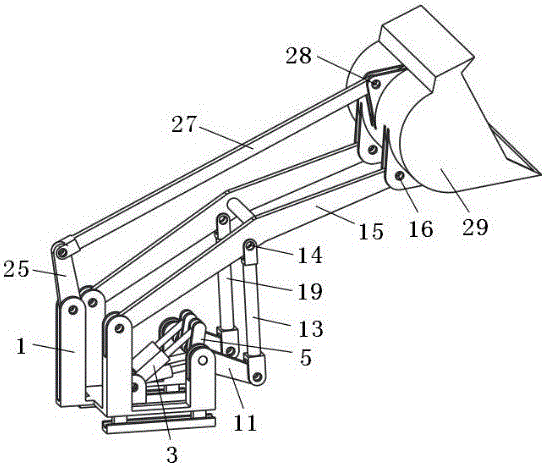
[0026] control figure 1 , a multi-unit linear drive three-degree-of-motion loading robot according to the present invention includes a multi-unit linear drive mechanism, a boom lifting mechanism, a bucket control mechanism and a frame 1 .
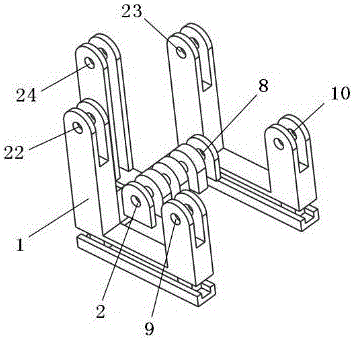
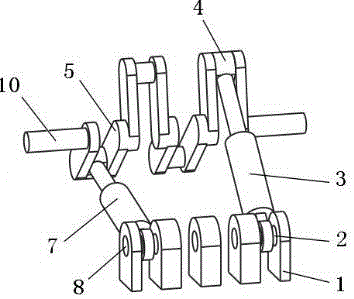
[0027] control figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , the multi-unit linear drive mechanism is composed of a first linear driver 3, a second linear driver 7, and a crankshaft 5, and the crankshaft 5 is connected to the frame 1 through the first rotating pair 9 and the second rotating pair 10, and the One end of the first linear drive 3 is connected to the frame 1 through the third rotating pair 2, and the other end is connected to the crankshaft 5 through the fourth rotating pair 4, and one end of the second linear drive 7 is connected to the frame 1 through the fifth rotating p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More