A compact parallel kinematics robot
A robot and motion technology, applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve a lot of space problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
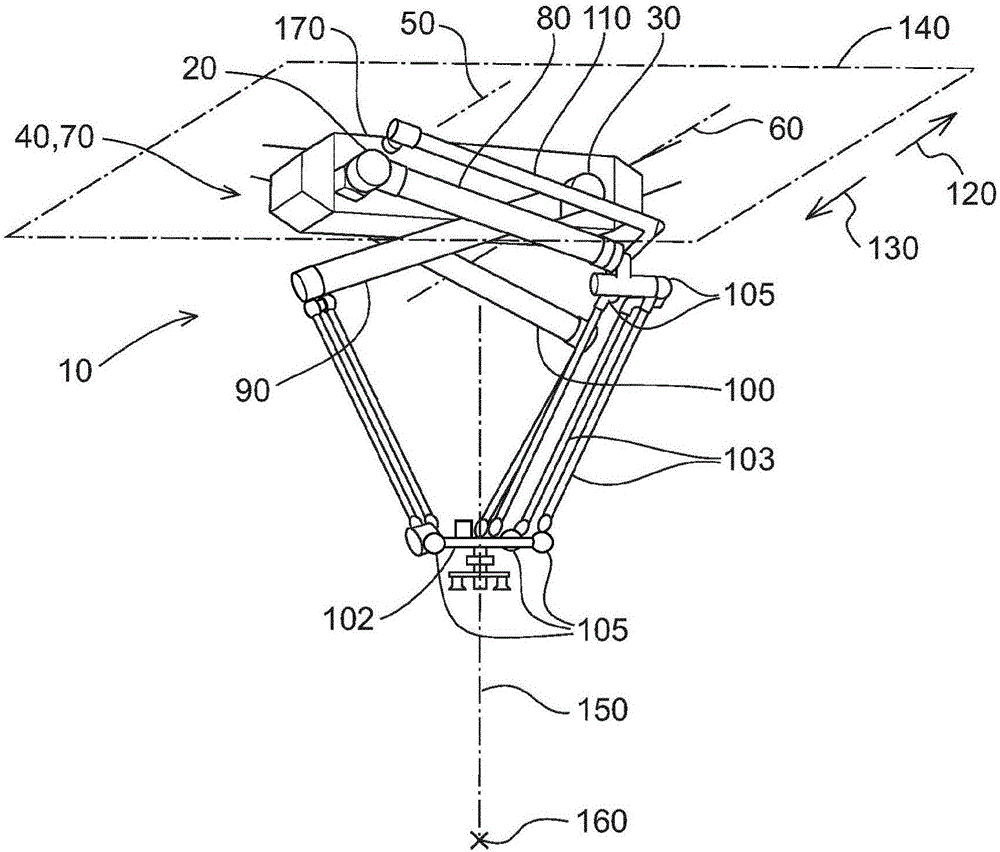
[0017] see figure 1 , the parallel kinematic robot 10 according to one embodiment of the invention comprises a first shaft 20 rotatable around a first axis 50 , a second shaft 30 rotatable around a second axis 60 and a third shaft rotatable around a third axis 70 40. The first drive arm 80 is attached to the first shaft 20 , the second drive arm 90 is attached to the second shaft 30 and the third drive arm 100 is attached to the third shaft 40 , each drive arm 80 , 90 , 100 Together with the respective shaft 20 , 30 , 40 it rotates about the respective axis 50 , 60 , 70 . The first drive arm 80 is connected to the end effector 102 by means of three rods 103 , the second drive arm 90 is connected to the end effector 102 by means of two rods 103 and the third drive arm 100 is connected by means of one rod 103 to the end effector 102 . Each rod 103 is connected to the respective drive arm 80, 90, 100 and end effector 102 by means of a joint 105 having three DOF. Parallel to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com