

Parallel kinematic mechanisms with decoupled rotational motions
a kinematic mechanism and rotational motion technology, applied in the field of minimal access tools, can solve the problems of non-intuitive control, increasing frequency and complexity of minimal access surgery (mis) and other minimal access procedures, and increasing complexity of minimal access procedures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
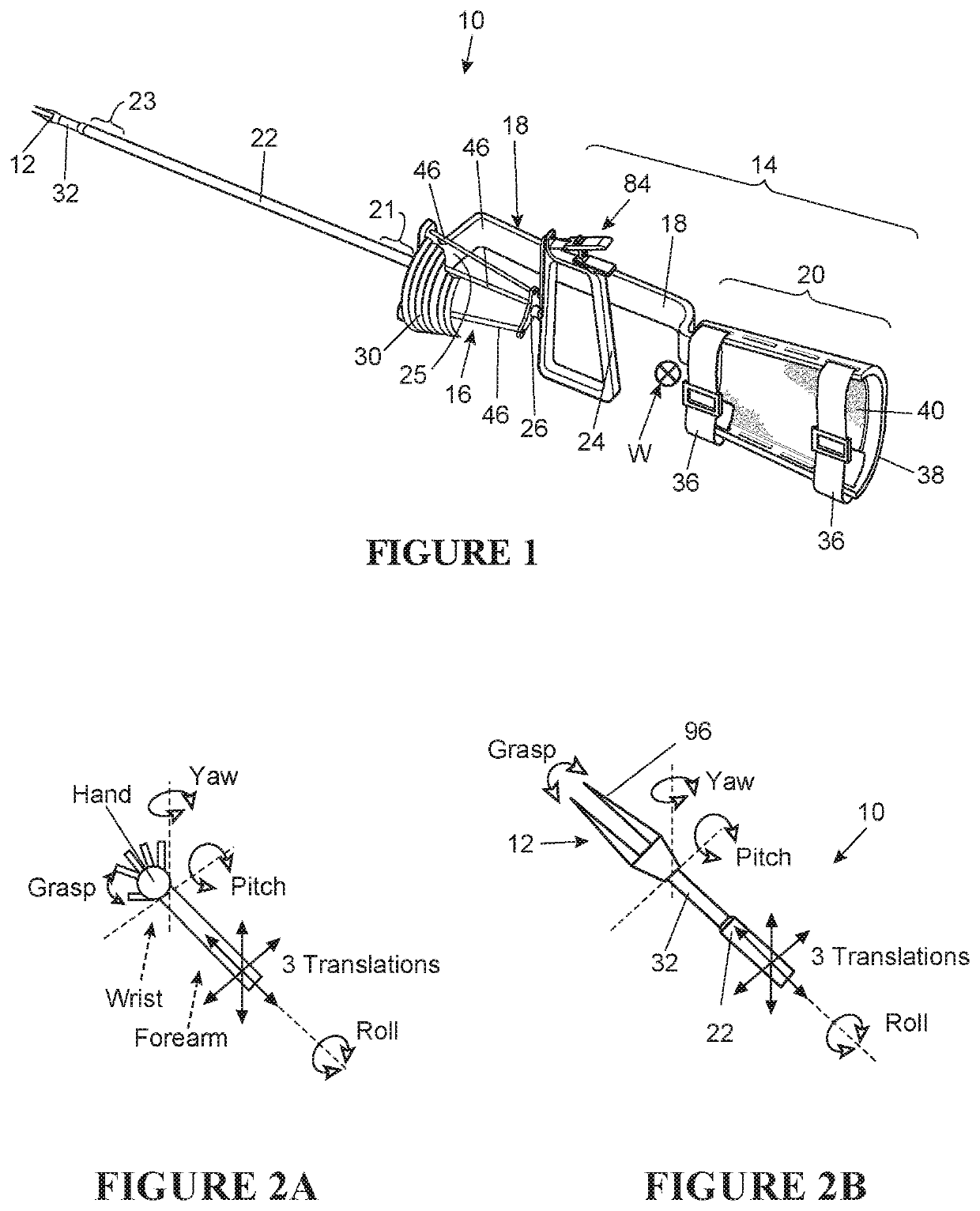
[0123]Described herein are parallel kinematic (PK) mechanism apparatuses based on a constraint map focusing on articulation motion (i.e. two orthogonal rotations). As will be described in greater detail below, although the constraint map is specific and well-defined, it serves as the basis for multiple physical embodiments that may look physically different but all incorporate the same basic underlying concept. The apparatuses and methods described herein may embody applications of the parallel kinematic constraint map shown in FIG. 26.
[0124]The constraint map shown in FIG. 26 indicates that, for a device such as a minimally invasive surgical tool which includes a frame portion and a handle portion, there may be at least two independent, non-overlapping paths of connection, which make a parallel kinematic arrangement. The frame 2603, handle 2601, intermediate body A 2605, and intermediate body B 2607 may be generally “rigid” (e.g., difficult to bend or deform). Connector 1 (2611), c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More