

Target following control method of mobile robot
A mobile robot and following control technology, which is applied to the control of finding targets, non-electric variable control, two-dimensional position/channel control, etc., can solve complex wiring network structure, unfavorable following target tracking, feature extraction and Detection and other problems, to achieve the effect of expanding the viewing angle range, high automatic control function, and enhancing the target following function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Embodiments of the present invention will be described below in conjunction with the accompanying drawings.
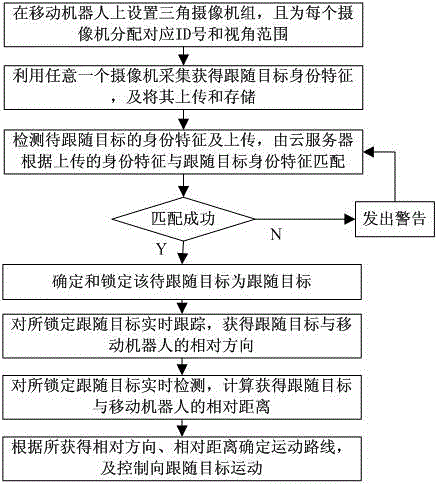
[0030] Such as figure 1 As shown, the present invention has designed a kind of target following control method of mobile robot, and this method is based on mobile robot and cloud server, and mobile robot and cloud server rely on wireless transmission technology to establish communication, specifically comprise the following steps for this method:
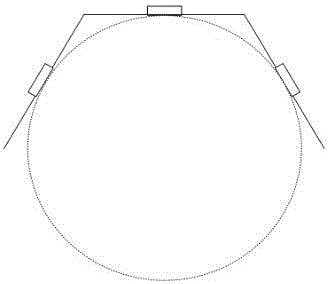
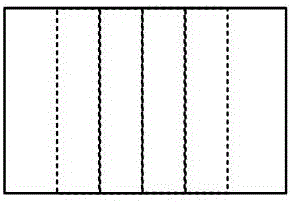
[0031] Step 1. Set up a triangular camera group on the mobile robot, and assign a corresponding ID number and viewing angle range to each camera; where, such as figure 2 As shown, the circle in the figure represents the body of the mobile robot, and the rectangles in three different directions represent three cameras forming a triangular camera group, where the three cameras are set along different directions of the mobile robot; and, the viewing angle range of a single camera is as follows image 3 As shown, the vi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More