A six-degree-of-freedom fire-fighting manipulator for a fire-fighting robot in a substation
A fire-fighting robot and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, fire rescue, etc., can solve the problems of personal safety threats of firefighters, low overall efficiency of fire fighting and fire fighting, and reduced fire fighting efficiency, and achieve a wide range of fire-extinguishing sprays and fire-fighting. The effect of large spray range and high fire extinguishing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
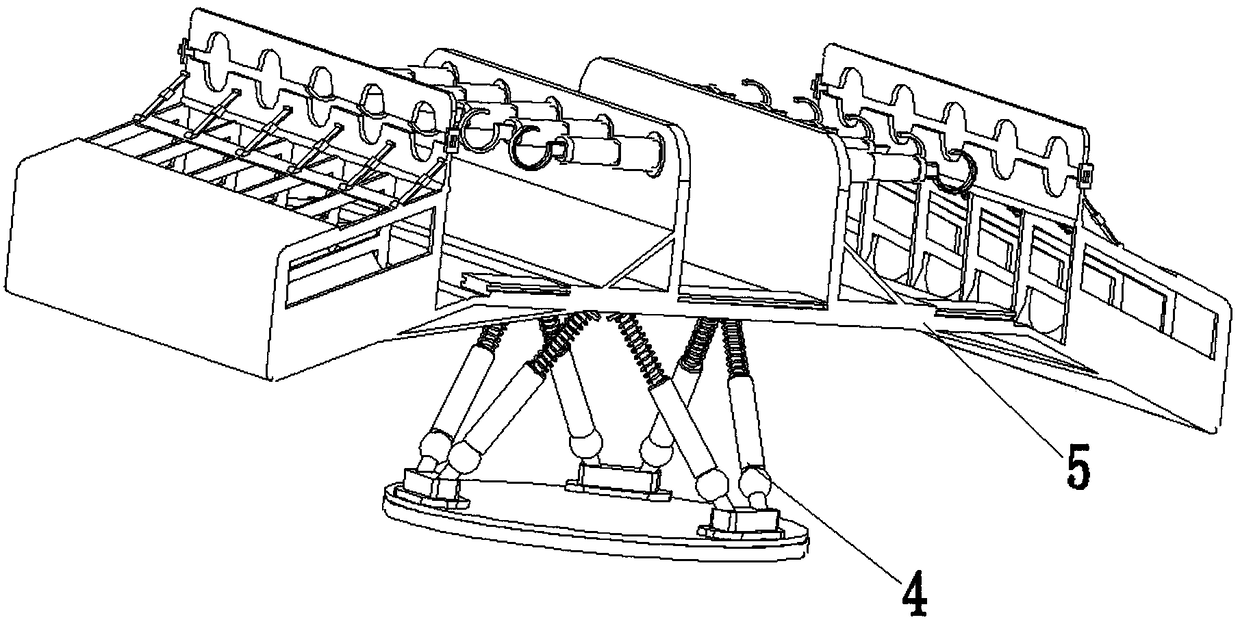
[0023] Such as Figure 1 to Figure 4 As shown, a six-degree-of-freedom fire-extinguishing manipulator for a distribution station fire-fighting robot includes a Stewart parallel mechanism 4 and a fire extinguishing device 5; 5 phase connection.
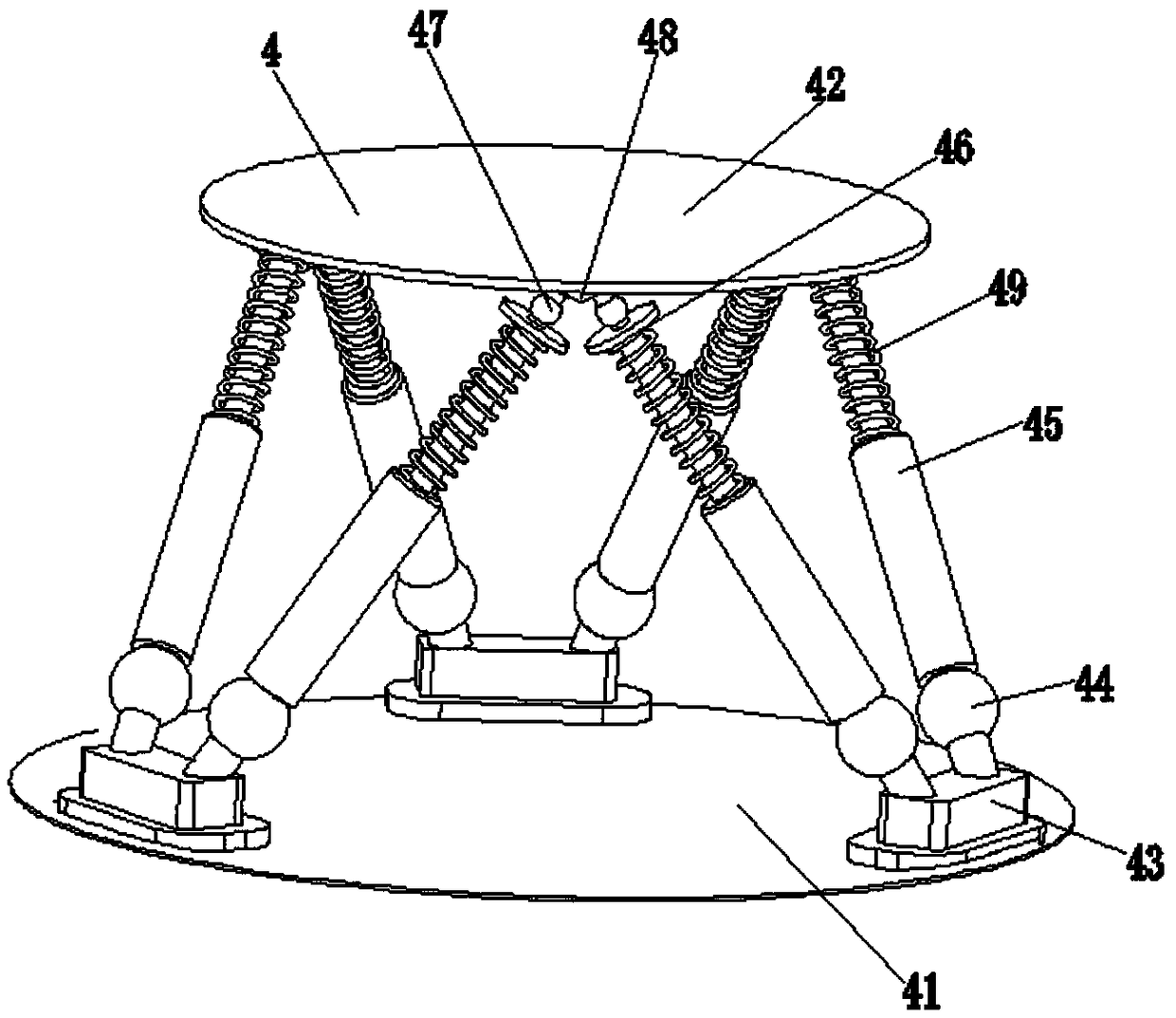
[0024] Such as figure 2As shown, the Stewart parallel mechanism 4 includes a fixed platform 41, a moving platform 42, a connecting seat 43, an upper ball hinge 44, an electric push rod 45, a disc seat 46, a lower ball hinge 47, a triangular seat 48 and a limit spring 49; the number of the connecting seat 43 and the triangular seat 48 is three, the number of the upper ball hinge 44, the electric push rod 45, the plate seat 46 and the lower ball hinge 47 are all six, the fixed platform 41 and the moving...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com