

Flexible quadruped robot
A quadruped robot, robot technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as difficulty in coordinating bending and leg movements, poor movement flexibility of bionic robots, and inability to turn bionic robots, and achieve stable running and steering. handy effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is described in detail below in conjunction with accompanying drawing:
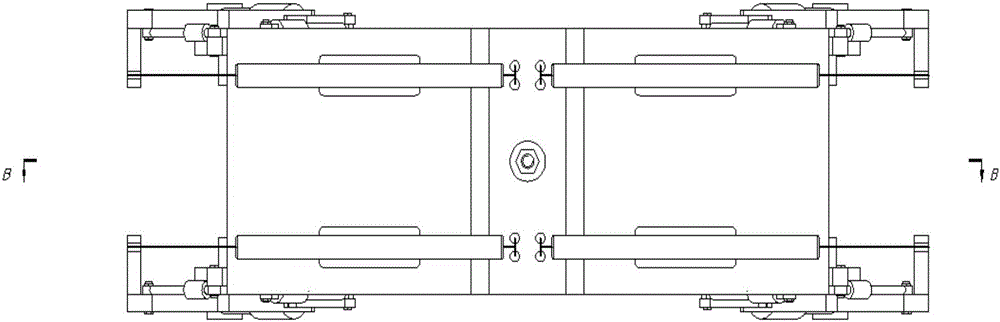
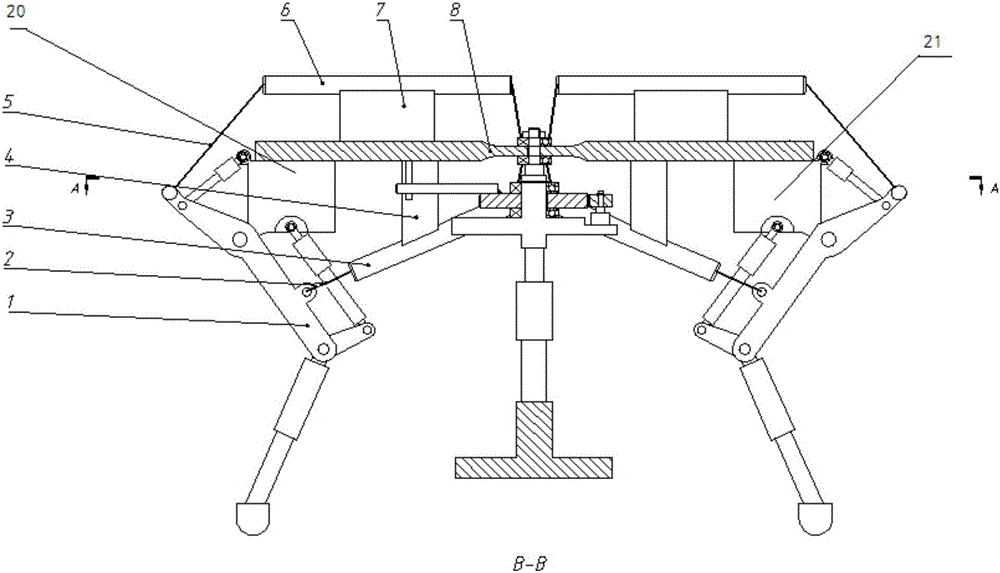
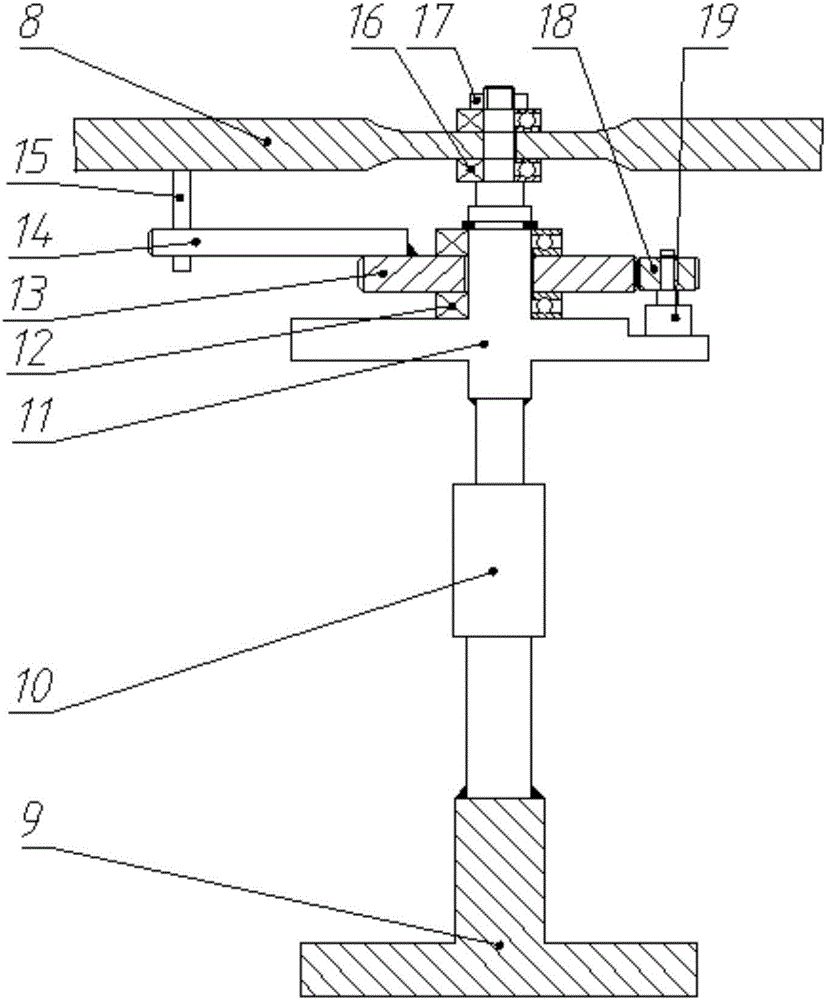
[0031] Such as figure 1 , 2 , 3 and 4, a running quadruped robot with flexible spine and steering device. Including thigh 1, four spine pull-down ropes 2; four lower hollow tubes 3; four lower support frames 4; four upper spine pull ropes 5; four upper hollow tubes 6; four upper support frames 7; Spine 8; base 9; central hydraulic cylinder 10; support shaft 11; thrust bearing 12; driven gear 13; shift lever 14; stop lever 15; thrust bearing 16; hexagonal bolt 17; driving gear 18; stepping motor 19; front shoulder beam 20; rear shoulder beam 21.
[0032] The two ends of the spine are respectively fixed on the front shoulder beam 20 and the rear shoulder beam 21, and the four legs are respectively connected with the front and rear shoulder beams, and the middle position of the thigh of each leg is respectively connected with a spine pull-down rope 2. One end of the spine pul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More