

Unmanned aerial vehicle flight controller attitude calculation and control method
A technology for flight controllers and UAVs, applied in attitude control, non-electric variable control, control/regulation systems, etc., can solve problems such as noise fluctuations in the power supply voltage of external power supply modules, data susceptible to interference, and flight controller interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0258] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
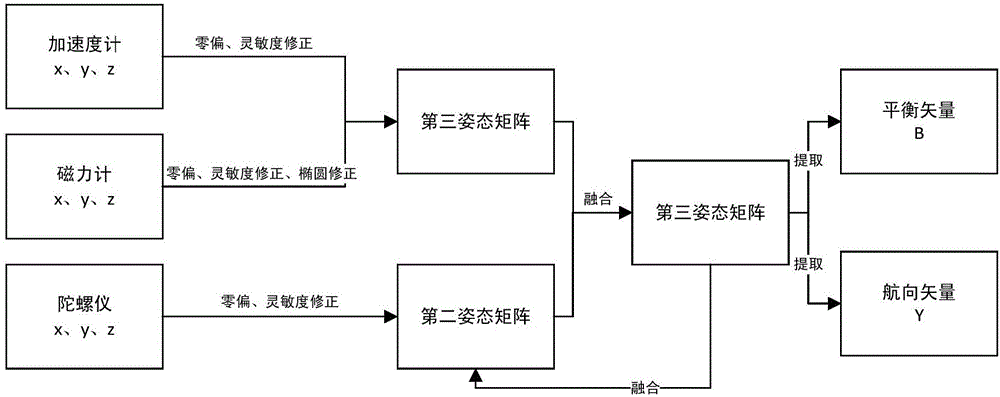
[0259] The invention discloses a method for calculating the attitude of an unmanned aerial vehicle flight controller, the basic process of which is as follows figure 1 shown.
[0260] Such as figure 1 As shown, the original three-axis accelerometer data is first corrected for zero bias and sensitivity error, and the original three-axis magnetometer data is corrected for zero bias, sensitivity error and ellipse error. After the two sets of fusion data are fused, the first attitude matrix is obtained. The original The three-axis gyroscope data is corrected for zero bias and sensitivity error to obtain the corrected three-axis gyroscope data, which is then fused with the third attitude matrix obtained in the previous control cycle to obtain the second attitude matrix, the first attitude matrix and The third attitude matrix is obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More