

USV water surface dynamic autonomous recovery UUV method
A dynamic and command technology, applied in non-electric variable control, two-dimensional position/channel control, instruments, etc., can solve the problem of the mother ship being occupied, and achieve the effect of less information, simple calculation, and easy engineering realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The specific implementation manner of the present invention will be further described below in conjunction with the accompanying drawings.
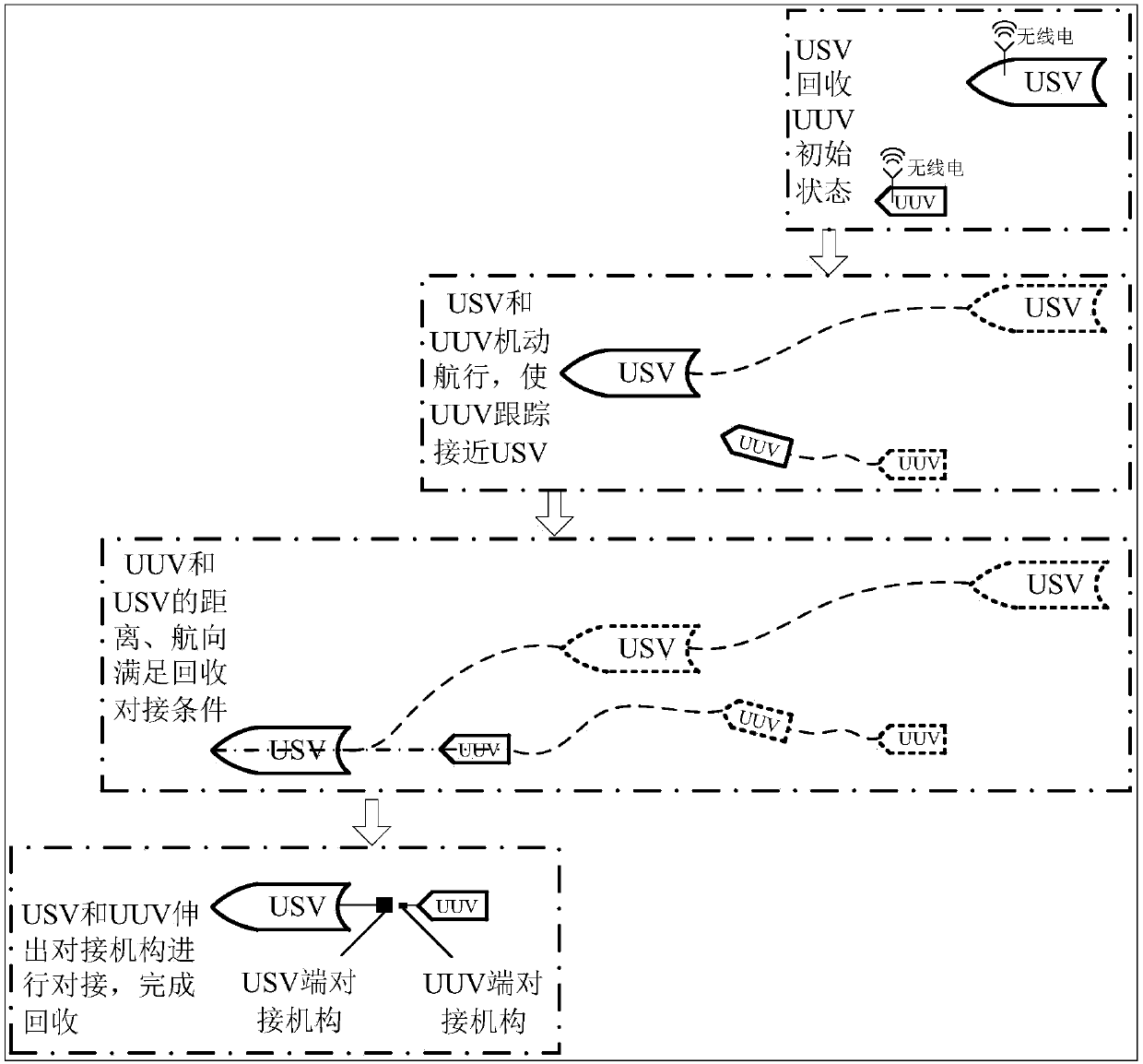
[0072] combine figure 1 , the process of dynamic recovery of UUV by USV water surface can be described as:
[0073] In the initial state of recovery, both USV and UUV float on the water surface, and the entire recovery process is also completed on the water surface. The USV and UUV communicate through the configured radio communication equipment to initiate the recovery process. After the recovery process starts, the USV and UUV sail according to their respective recovery maneuver strategies, with the aim of forming a navigation situation in which the UUV and USV gradually approach and the UUV follows and tracks the USV. When the distance and heading of the UUV and USV meet the recovery and docking conditions, the USV and UUV each extend out of the docking mechanism for docking, and the entire recovery process is completed.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More