

Flexible drive manipulator
A technology of manipulators and mechanical fingers, which is applied in the field of machinery, can solve problems such as the inability to realize fragile and soft objects, and achieve the effect of solving the problem of precise force control, realizing flexible driving, and realizing force control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
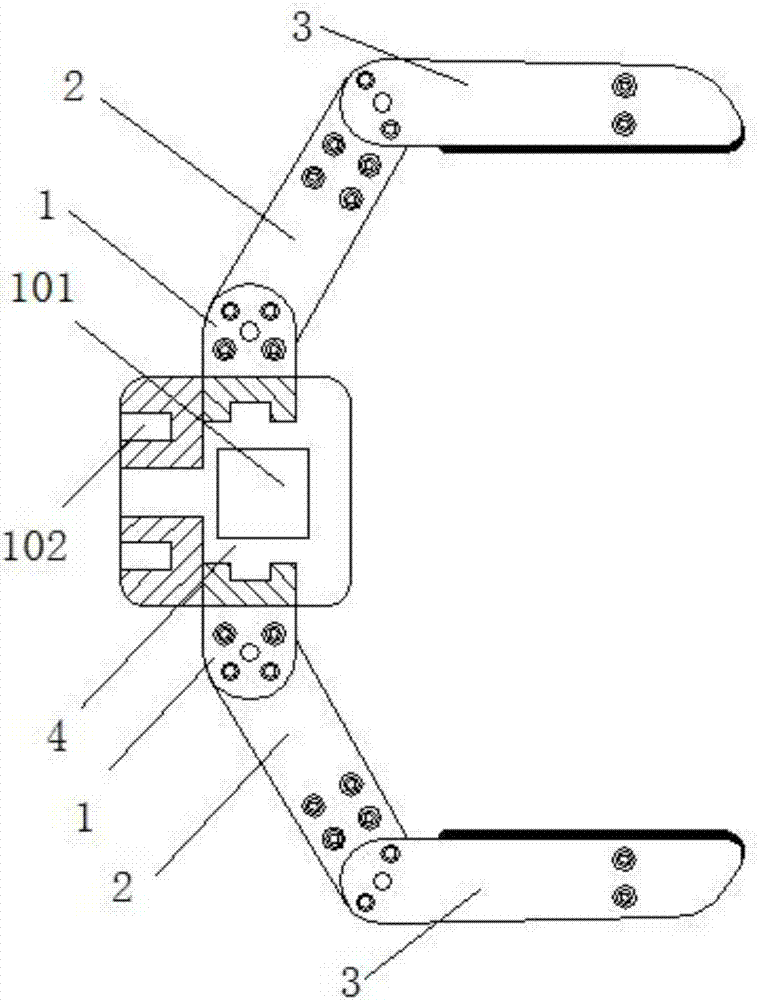
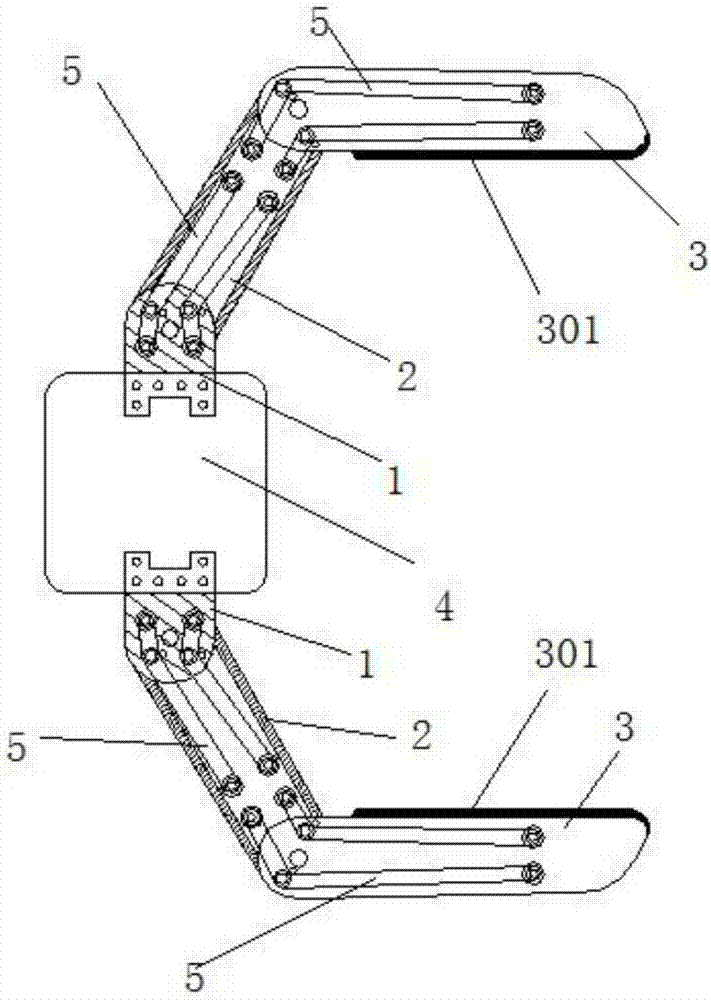
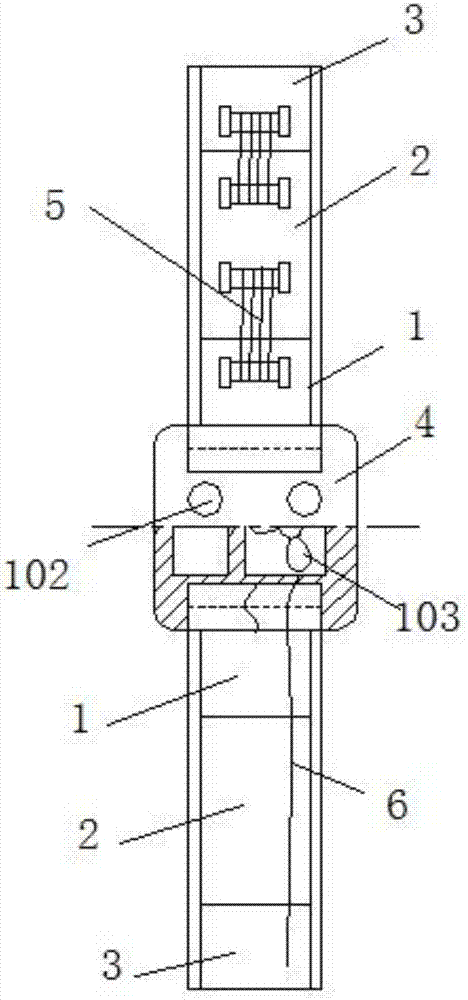
[0020] Such as Figure 1-6 It is an embodiment of a flexible driving manipulator of the present invention. A flexible driving manipulator includes: a mechanical hand 6 and a mechanical finger, and the mechanical fingers are arranged symmetrically on both sides of the mechanical hand 6. Connecting hole 102, the mechanical finger includes: the first phalanx 1, the second phalanx 2 and the third phalanx 3, the first phalanx 1 and the second phalanx 2 are hinged and passed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More