

Multi-configuration rope drive parallel robot and space position and posture solution method thereof
A rope-driven and robotic technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of high cost, complex structure, and low control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
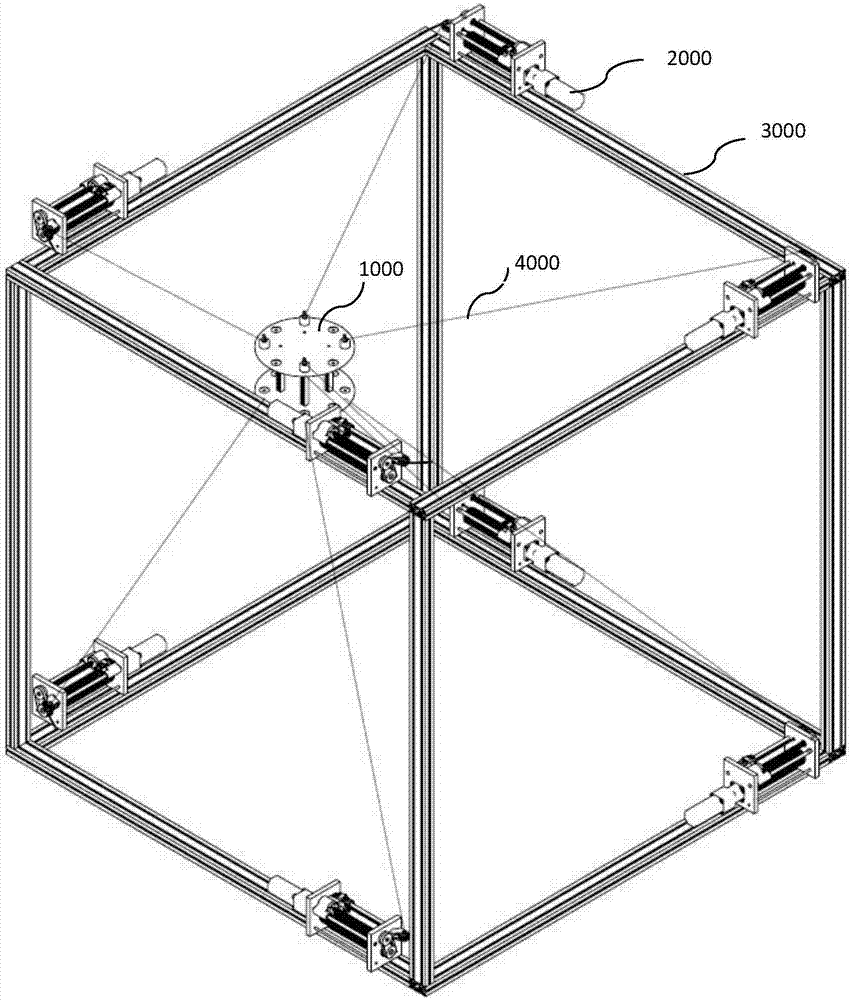
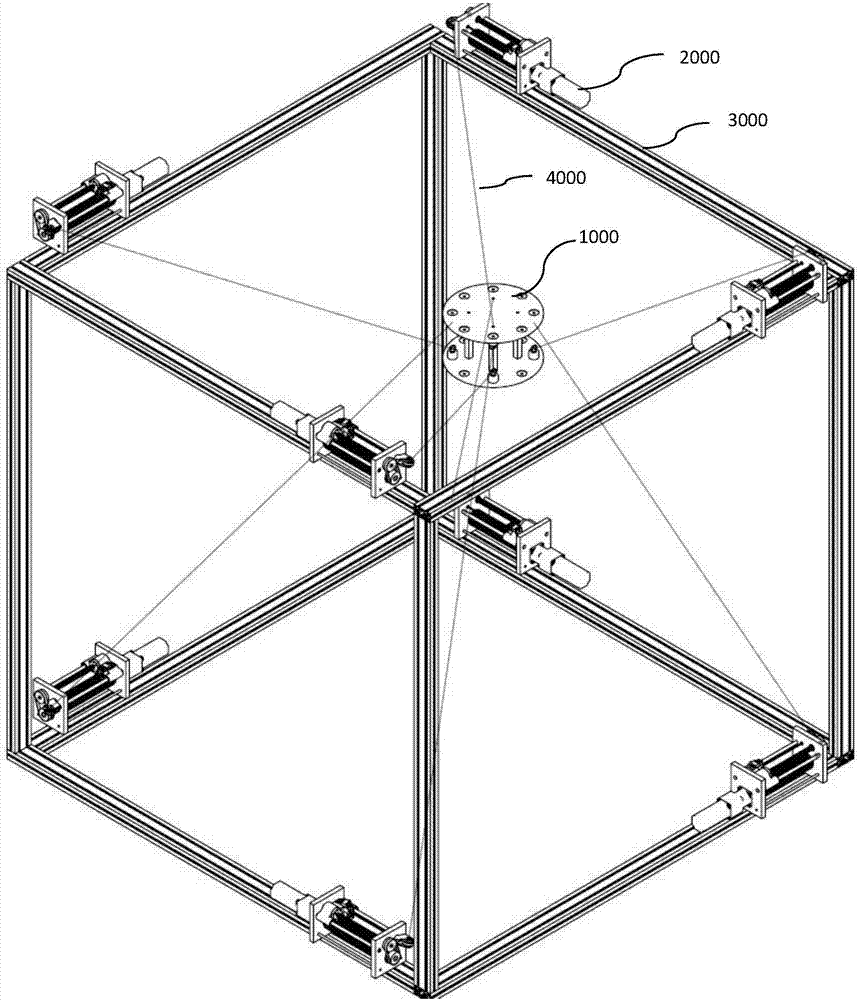
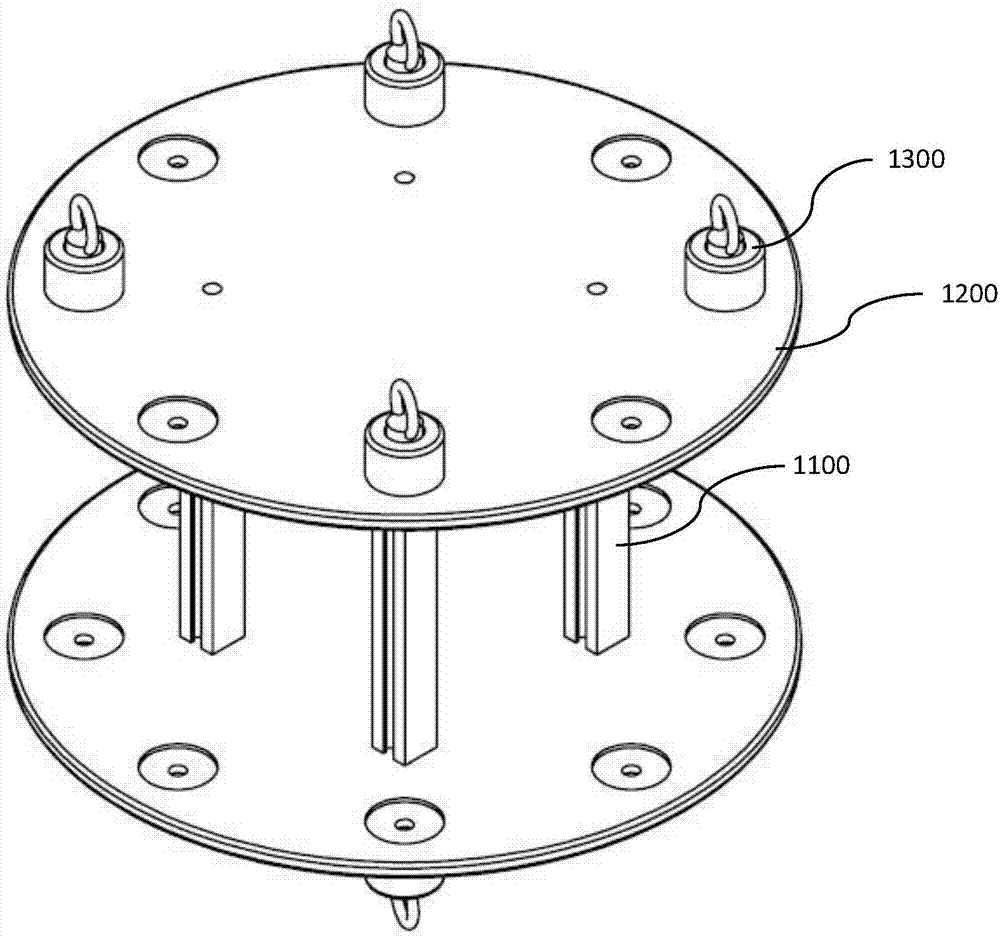
[0081] In this embodiment, a multi-configuration rope-driven parallel robot includes: a moving platform 1000, several rope-driven devices 2000, a main frame 3000 and several ropes 4000;
[0082] According to the needs of the task, the rope drive device 2000 is arranged at any position of the main body frame 3000; figure 1 As shown, the moving platform 1000 is located in the internal space of the main frame 3000, and the position and posture can be changed arbitrarily in the internal space; the rope driving device 2000 is connected with the moving platform 1000 through the flexible rope 4000, and uses the space pose to solve The method obtains the pose of the moving platform 1000 in the internal space of the main body frame 3000, thereby using the flexible rope 4000 to pull the moving platform 1000 to a corresponding position in the main body frame 3000, and changing the The corresponding posture of the moving platform 1000 is described. The connection mode between the flexibl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More