

Observer-based longitudinal speed control method for pure electric intelligent vehicles
A longitudinal vehicle speed, intelligent vehicle technology, applied in the field of vehicle control, can solve problems such as unmeasurable system parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
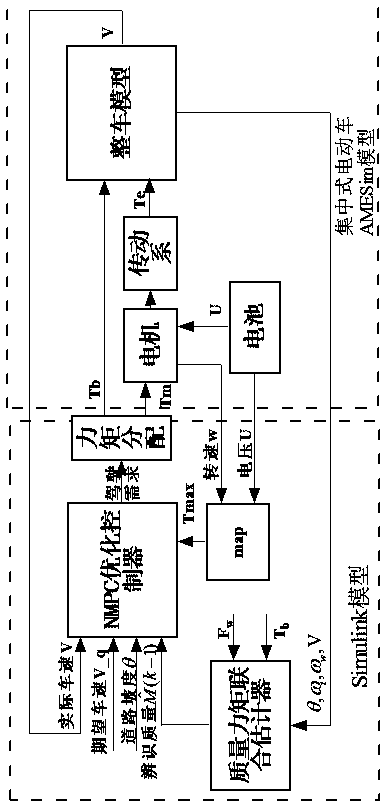
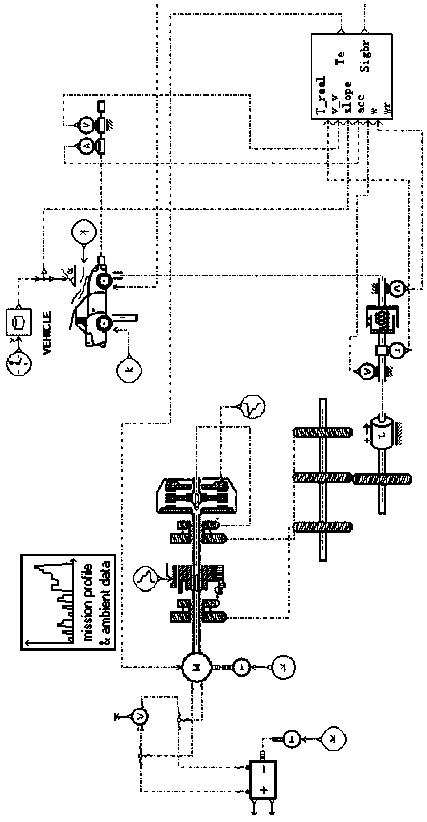
[0148] The control block diagram implemented by the electric vehicle torque optimization method based on data-driven predictive control in the present invention is as follows figure 1 As shown, the vehicle speed optimization controller in the figure is built in Simulink. The input of the controller is the expected vehicle speed, the actual vehicle speed is used as a measurable signal, and the mass and slope are fed back to the controller in real time as measurable disturbances. Tmax is the maximum driving torque of the motor , it is jointly determined by the mechanical characteristics of the motor and the output voltage of the battery, which not only reflects the hard constraints of the actuator of the motor itself, but also reflects the impact of the decrease in voltage on the performance of the vehicle as the battery discharge time increases. The driving torque obtained by the vehicle controller must be less than or equal to Tmax, so Tmax is given to the controller as a const...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More