

a help robot
A technology of robot and motor reducer, which is applied in the direction of equipment to help people walk, chairs for patients or special transportation tools, physical therapy, etc. Promote recovery and improve the effect of complications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
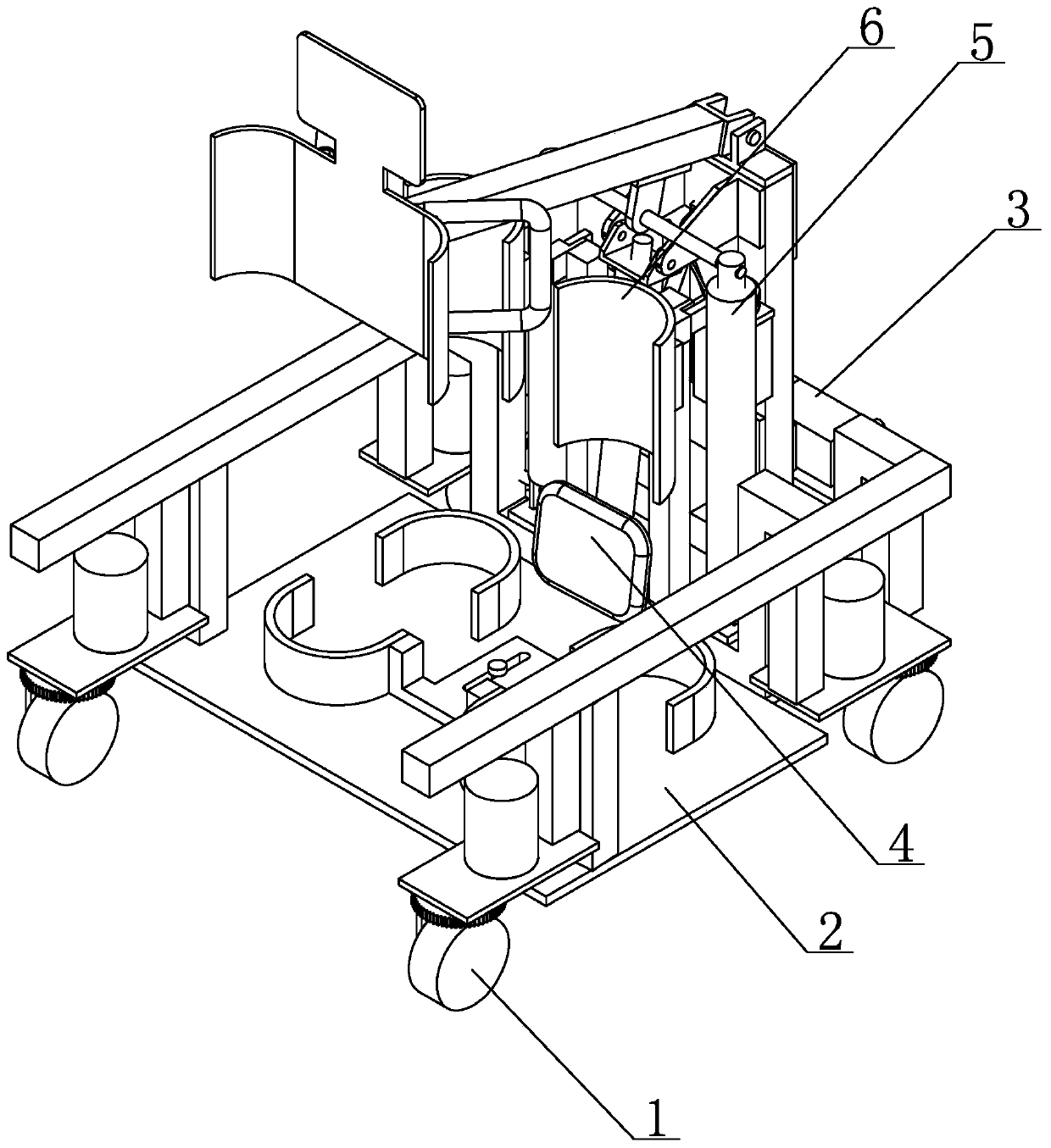
[0021] Specific implementation mode one: combine Figure 1 to Figure 8 Describe this embodiment, a kind of assisting robot of this embodiment, it comprises omnidirectional chassis 1, pedal mechanism 2, control system 3, automatic seat 4, lifting mechanism 5 and knee pad mechanism 6, pedal mechanism 2 installs On the rear portion on the omnidirectional chassis 1, the lifting mechanism 5 is installed on the front portion on the omnidirectional chassis 1, and the knee protection mechanism 6 and the automatic seat 4 are installed on the lifting mechanism 5 successively from top to bottom, and the knee protection mechanism 6 And automatic seat 4 can be adjusted by manually realizing lifting, and control system 3 is installed on the front end of lifting mechanism 5 and controls the action of omnidirectional chassis 1, automatic seat 4, lifting mechanism 5 and knee pad mechanism 6.
specific Embodiment approach 2
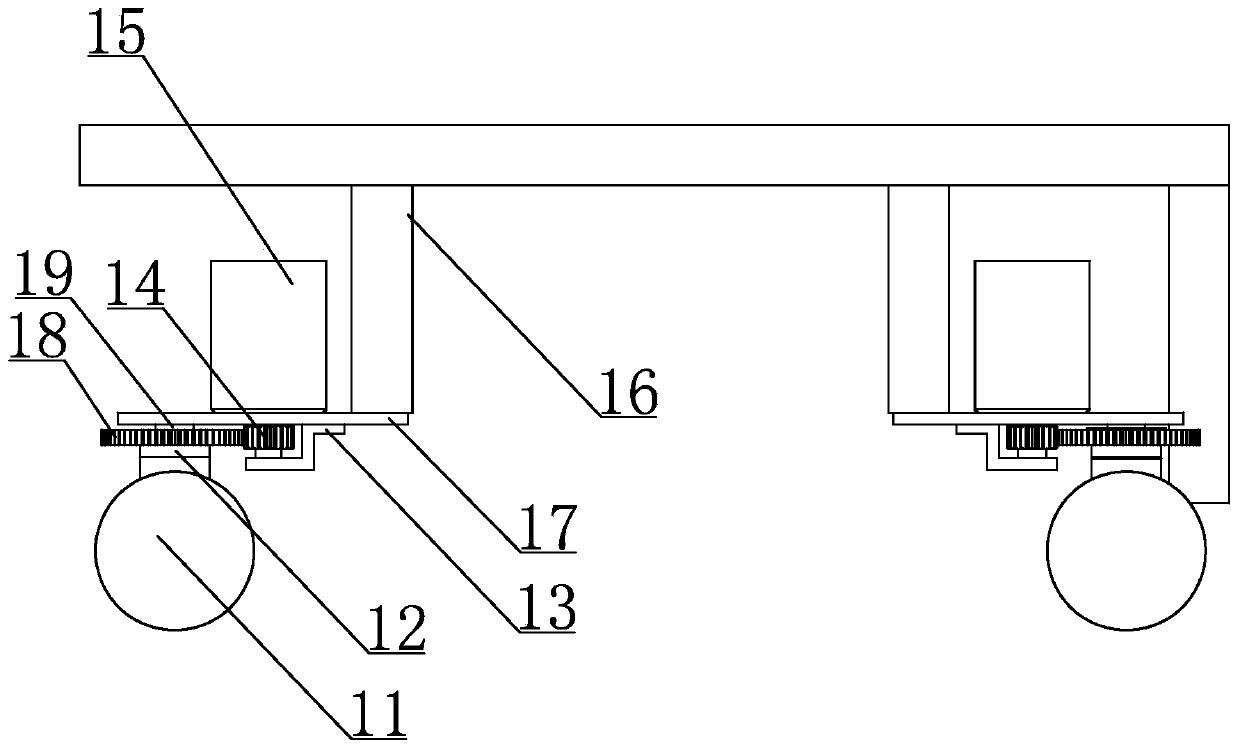
[0022] Specific implementation mode two: combination figure 1 and figure 2 Describe this embodiment, the omni-directional chassis 1 of this embodiment includes a driving mechanism frame 16 and four groups of moving assemblies with the same structure, and the four groups of moving assemblies with the same structure are respectively installed at the four corners of the lower end of the driving mechanism frame 16 . In this way, four moving components are arranged at the lower end of the driving mechanism frame 16. When these four moving components are actually used, by controlling the four moving components respectively, they can move in all directions without dead ends, and can turn on the spot. More flexible, user-friendly and suitable for patients. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0023] Specific implementation mode three: combination figure 1 and figure 2 Describe this embodiment, the moving assembly of this embodiment comprises chassis motor speed reducer 15, driving mechanism mounting plate 17, gear fixing frame 13, chassis pinion 14, chassis large gear 18, chassis rotating shaft 19, driving wheel fixing bracket 12 and drive Wheel 11, driving mechanism mounting plate 17 is installed on the lower end of driving mechanism frame 16, gear holder 13 is installed on the lower end of driving mechanism mounting plate 17, chassis motor reducer 15 is installed on the driving mechanism mounting plate 17, chassis motor reducer 15 The output shaft passes through the drive mechanism mounting plate 17 and is connected with the chassis pinion 14 that is rotatably installed on the gear holder 13. The chassis bull gear 18 is installed on the lower end of the drive mechanism mounting plate 17 by the chassis rotating shaft 19, and the chassis pinion 14 and The chassis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More