

Underactuated robot finger multi-joint any-angle immediate synchronous locking device
A robot finger, any angle technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems that the locking mechanism and the adaptive underactuated fingers are not independent, cannot achieve instant locking, difficult to simply transplant and universal, etc. Light, simple structure, and the effect of preventing springback and instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
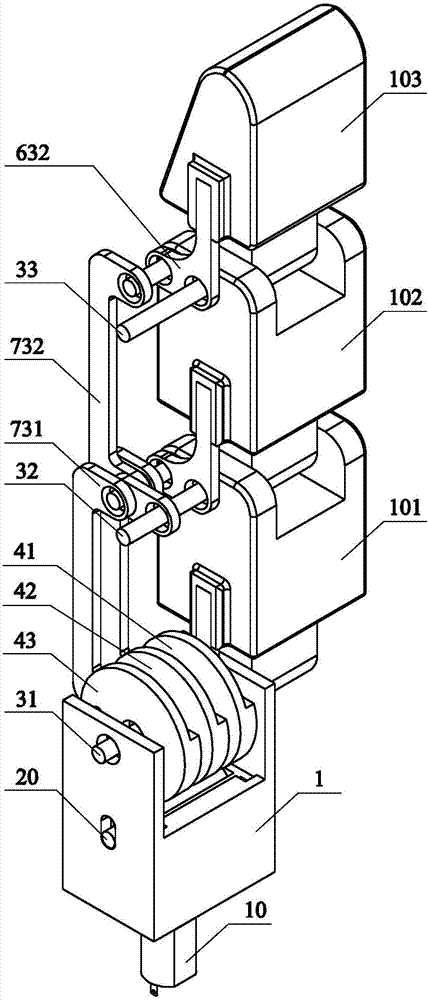
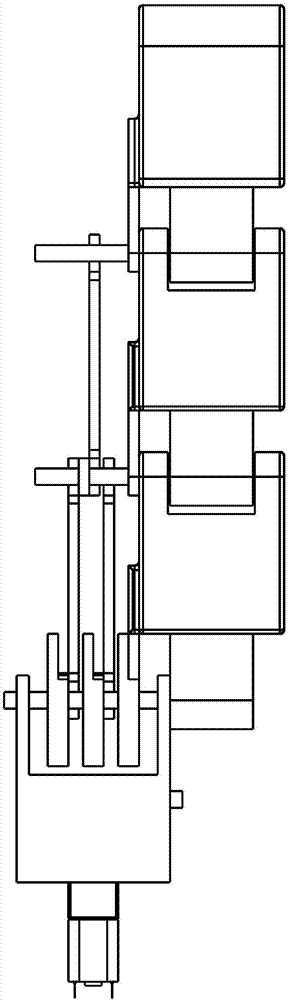
[0044] The specific structure, working principle and working process of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0045] The invention provides an underactuated robot finger multi-joint real-time synchronous locking device at any angle, including a base, N finger segments and N joint shafts; the first joint shaft sleeve is set on the base ... the i-th joint shaft sleeve is set on the In the i-1 finger section; the first finger section is socketed on the first joint axis...the i-th finger section is socketed on the i-th joint axis; the centerlines of all joint axes are parallel to each other; it is characterized in that: the The instant synchronous locking device for driving the multi-joint joints of the robot at any angle also includes a motor, a transmission mechanism, a sliding frame, a driving shaft, a driving wheel, Q driven wheels, and a Q-level connecting rod assembly; the motor is fixe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More