

Parallel Mechanism with Two Movement Modes 2r1t and 2t1r
A motion mode, 2T1R technology, applied in the field of robotics, can solve the problem of less parallel mechanisms, and achieve the effect of high accuracy, strong dexterity and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
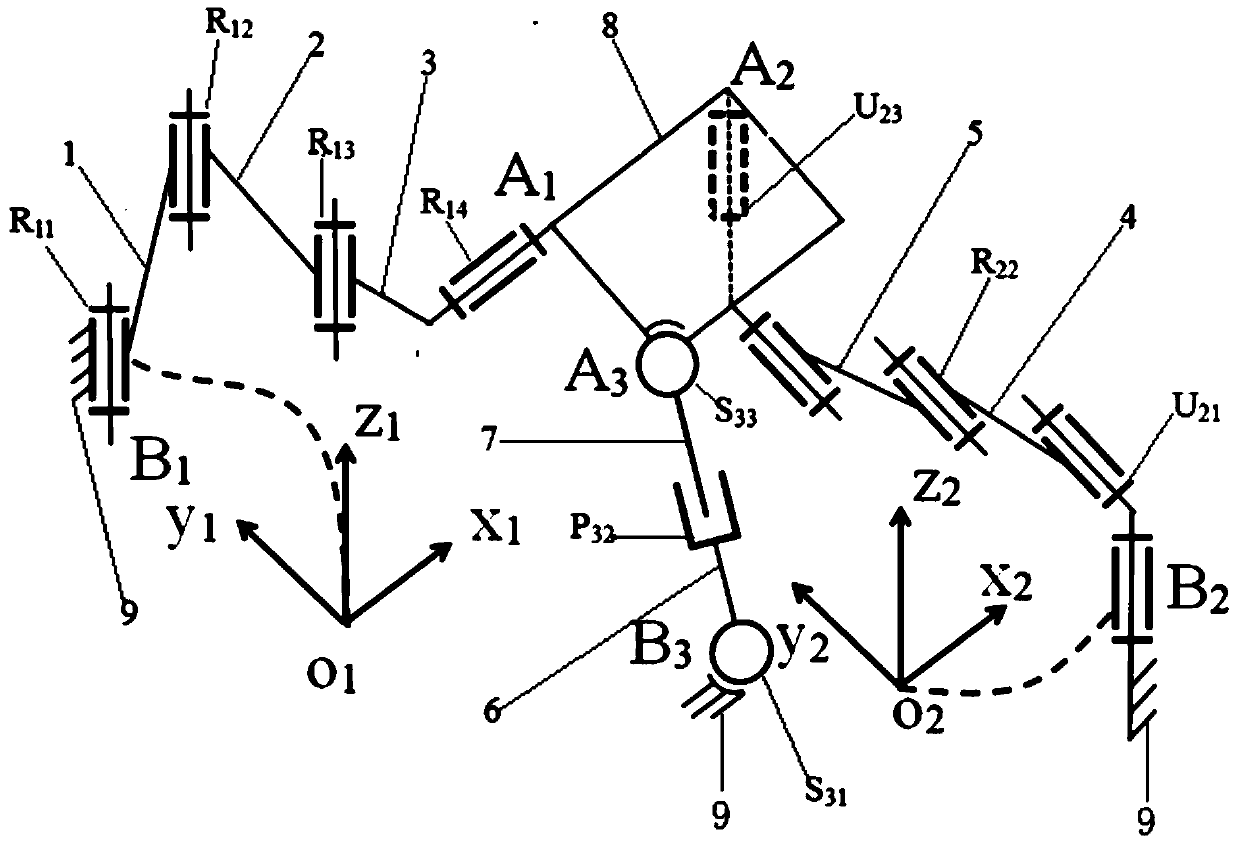
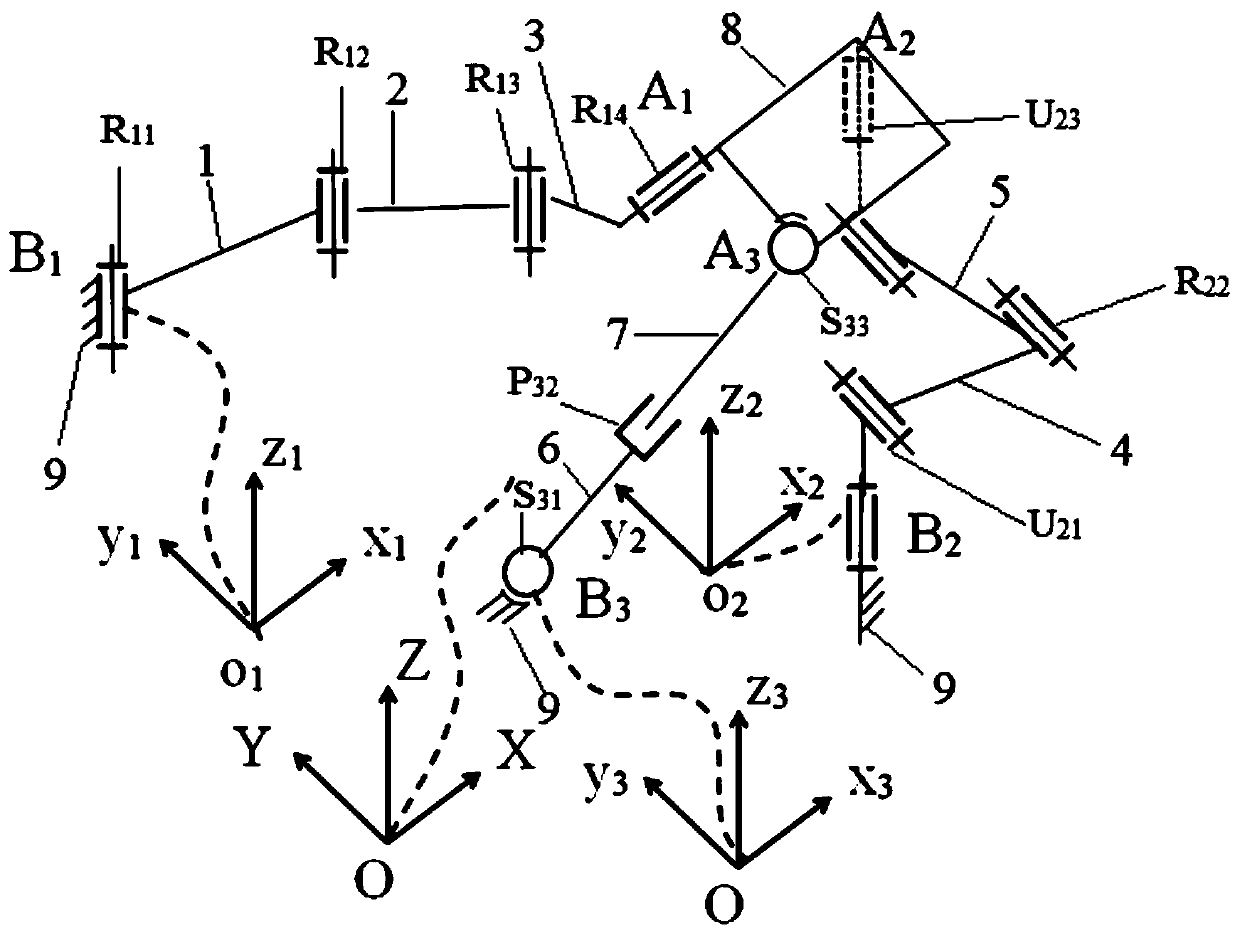
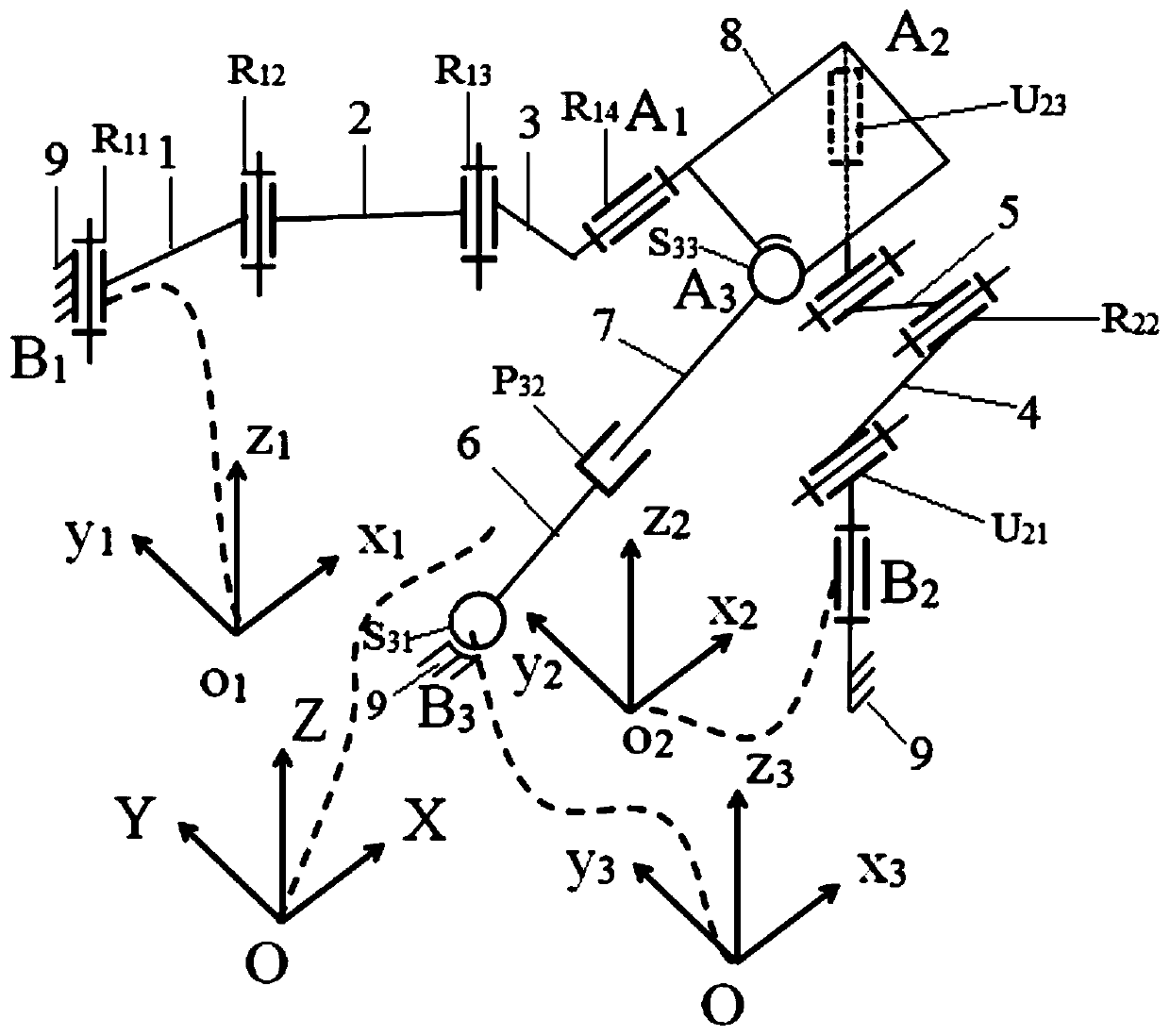
[0023] The present invention has the parallel mechanism of two motion modes of 2R1T and 2T1R, such as figure 1 As shown, it includes a rectangular moving platform 8 and a fixed platform 9. The moving platform 8 is connected to the fixed platform 9 through the first branch chain, the second branch chain and the third branch chain respectively. for A 1 , the connection between the second branch chain and the moving platform 8 is denoted as A 2 , the connection between the third branch chain and the moving platform 8 is denoted as A 3 , the connection between the first branch chain and the fixed platform 9 is denoted as B 1 , the connection between the second branch chain and the fixed platform 9 is denoted as B 2 , the connection between the third branch chain and the fixed platform 9 is denoted as B 3 .
[0024] The first br...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More