

A human-computer interactive greenhouse fruit and vegetable harvesting robot system and harvesting method
A robot system and human-computer interaction technology, applied in the field of fruit and vegetable harvesting robot system and operation process, can solve the problems of difficult platform architecture research and design, limited working space, high labor intensity, etc., to improve operation efficiency, reduce operation cost, The effect of reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
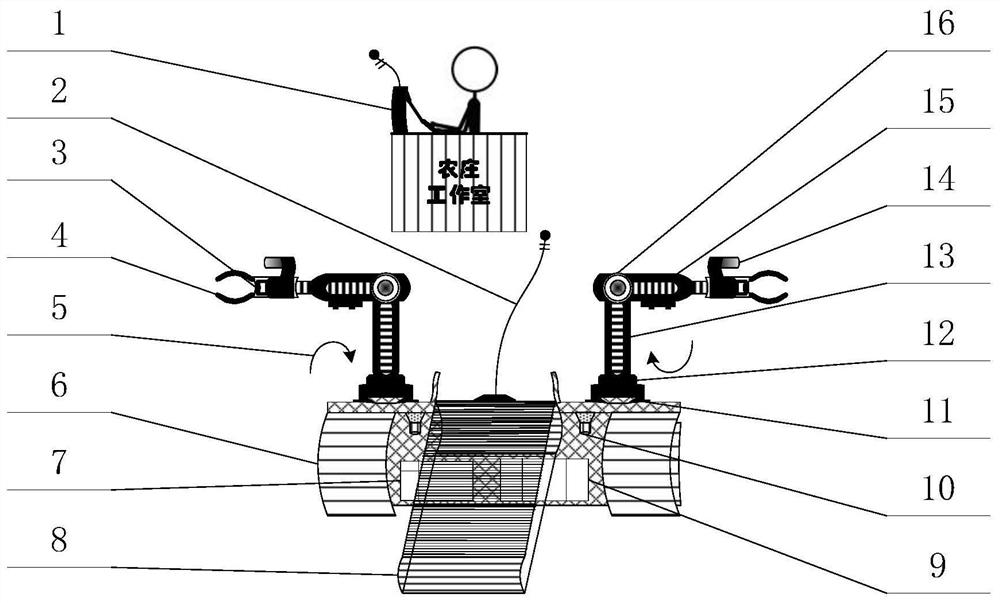
[0034] like figure 1 As shown, after the system is started, the navigation interface is selected on the human-computer interaction screen 1, and the staff based on the 10 collected navigation images, the wireless remote guidance platform enters the plantation fruit and vegetable lane driven by the power control device 9, and the crawler wheels on both sides 6 side manipulators Respectively facing fruit and vegetable, start the fruit and vegetable conveyor belt 8 in the middle of the platform. Adjust the position of the manipulator based on the bottom-up harvesting criterion through 16, and complete the mapping calibration of the image coordinate system and the manipulator coordinate system on the human-computer interaction screen 1 setting interface; switch the fruit and vegetable picking interface, and 14 fruit and vegetable image acquisition cameras T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More