

A compliant manipulation device based on visual feedbacks and an automated detecting method for liquid bridge force
A visual feedback, operating device technology, applied in surface tension analysis, non-electric variable control, instruments, etc., can solve problems such as the inability to detect liquid bridge force in real time, and the inability to effectively guide operation tasks online.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
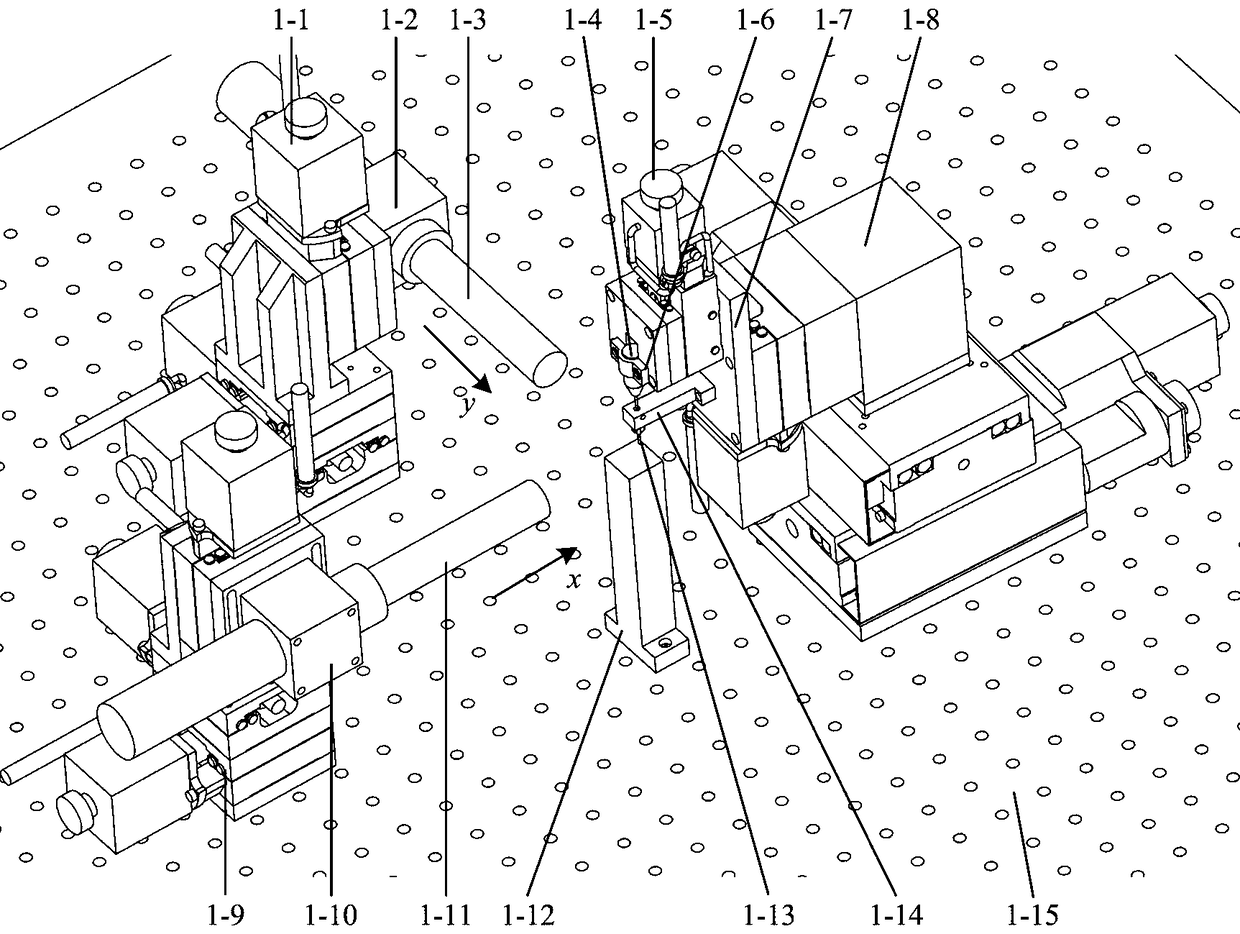
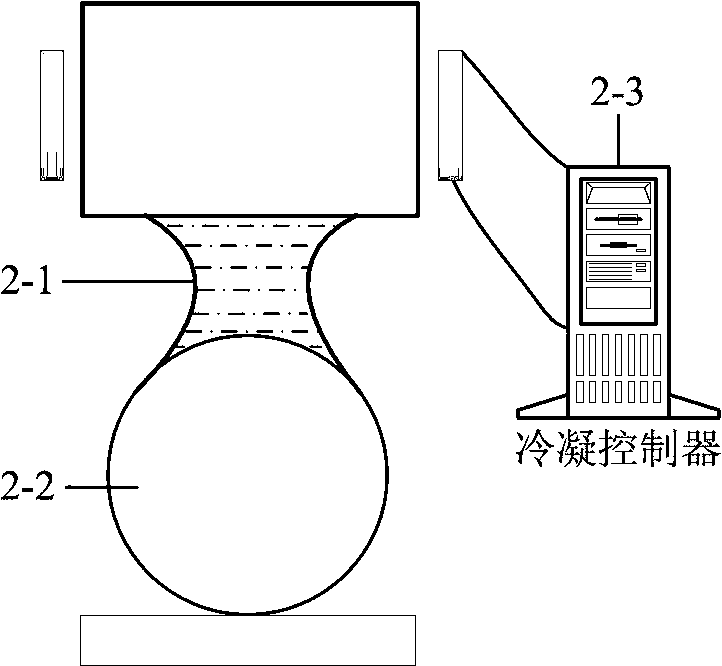
[0022] Specific implementation mode one: combine figure 1 and figure 2 Explain that a compliant operation device based on visual feedback in this embodiment includes a motion control module, a visual feedback module, an end effector module, a vibration isolation table 1-15, and an operation base (1-12). The motion control module includes an x-direction Three-axis precision electric platform 1-9, y-direction three-axis precision electric platform 1-1, operator three-axis precision electric platform 1-8, the visual feedback module includes x-direction microscope 1-11, x-direction microscope fixture 1-10, y direction microscope 1-3, y direction microscope fixture 1-2, the end effector module includes actuator adjustment motor 1-5, connecting plate 1-7, actuator chuck 1-4, chuck fixture 1-6, Condensation unit 1-14, condensation actuator 1-13, condensation controller 2-3; the x-direction three-axis precision electric platform 1-9, y-direction three-axis precision electric platfor...
specific Embodiment approach 2
[0023] Specific implementation mode two: combination figure 1 It is explained that the x-direction microscope 1-11 and the y-direction microscope fixture 1-2 of the compliant operation device based on visual feedback in this embodiment are arranged vertically in the same plane.
specific Embodiment approach 3
[0024] Specific implementation mode three: combination figure 1 and figure 2 It is explained that the temperature of the condensing unit 1-14 channels of a compliant operation device based on visual feedback in this embodiment is adjusted in real time by the condensing controller 2-3.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More