

Robot control method based on Bayesian classifier
A Bayesian classifier and control method technology, which is applied in the direction of program control manipulators, instruments, manipulators, etc., to achieve the effect of reducing randomness and good consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The robot control method based on the Bayesian classifier of the present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
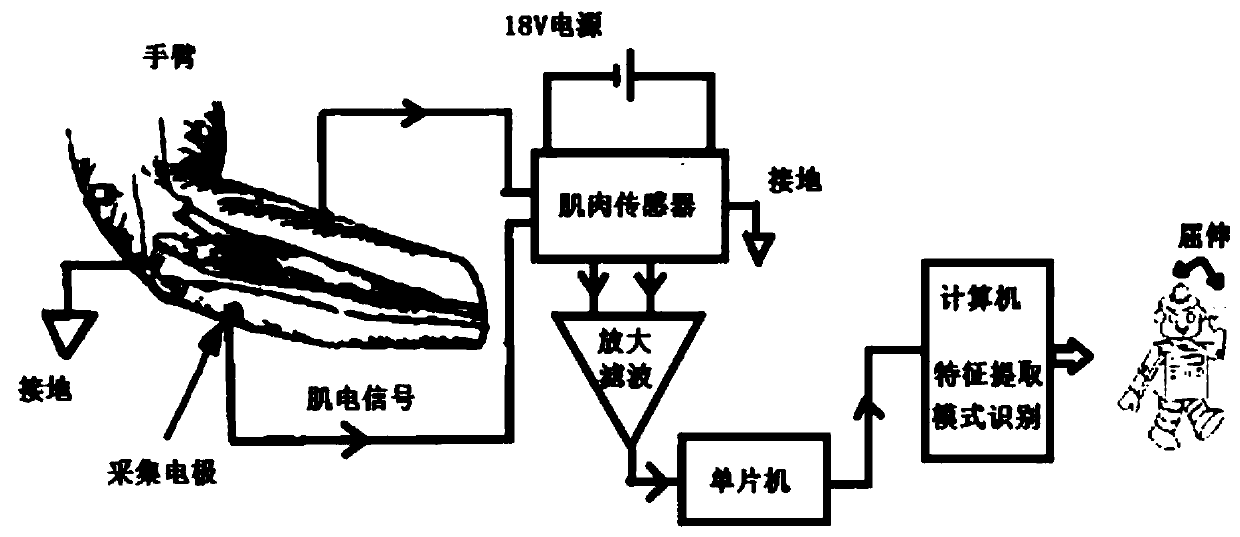
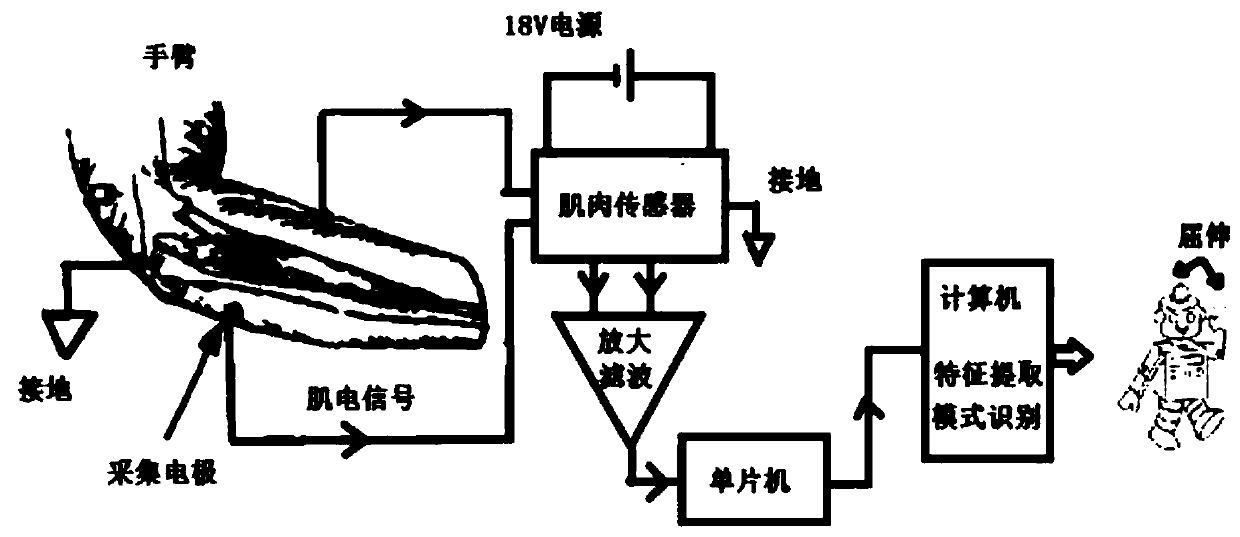
[0055] Such as figure 1 Shown, the robot control method based on Bayesian classifier of the present invention, comprises the steps:
[0056] 1) Use the Arduino muscle sensor to collect the surface electromyography signals generated by arm movements, and perform preprocessing of amplification and filtering on the collected surface electromyography signals generated by arm movements;
[0057] The surface electromyography signals produced by the arm movement include the biceps brachii surface electromyography signals and the triceps brachii surface electromyography signals of the flexing arm movement, and the biceps brachii surface electromyography signals and the brachial muscle electromyography signals of the arm extension movement. Surface electromyography of the triceps.
[0058] 2) T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More