

Unmanned aerial vehicle route planning method based on improved bat algorithm
A bat algorithm and route planning technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem that the setting of the two-dimensional experimental environment is too simple, the algorithm execution stability is not high enough, There are no problems such as 3D simulation experiments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
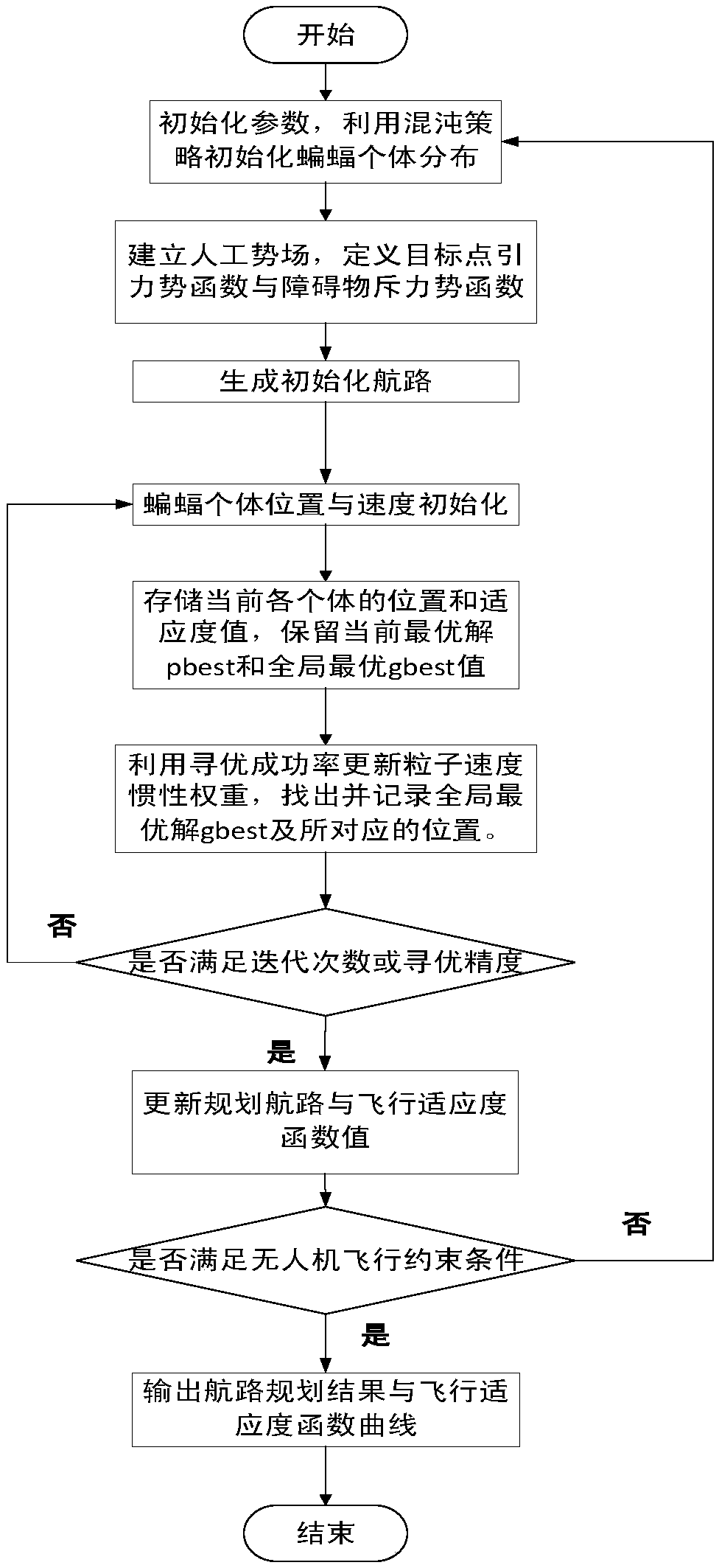
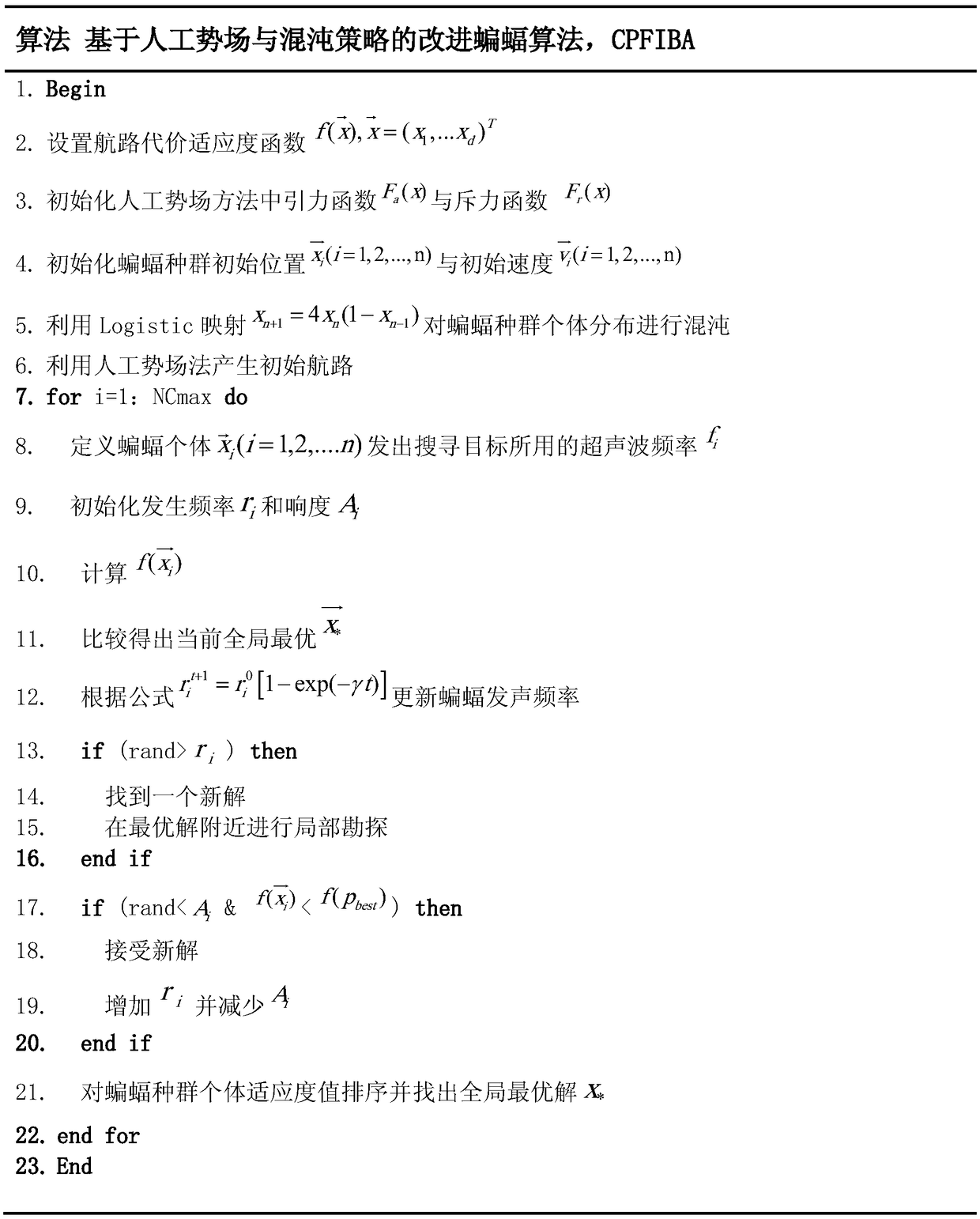
Method used
Image

Examples
Embodiment 1
[0105] In the two-dimensional environment simulation experiment, the overall picture of the two-dimensional terrain environment can be reflected from the route planning effect map, and the topographic map is no longer presented separately. The two-dimensional Cartesian coordinates of the starting point in the two-dimensional terrain environment are (0, 0), the coordinates of the target point are (110, 100), and the settings of various obstacles are shown in Table 1:
[0106] Table 1 Threat source settings of 2D environment simulation experiment
[0107]
[0108] The comparison of the optimal route length, route cost fitness function value and algorithm execution time of BA, DEBA and CPFIBA in the two-dimensional environment (30 iterations of a single experiment, taking the average value of ten independent experiments) is shown in Table 2:
[0109] Table 2 Comparison of various performance indicators of the improved algorithm in two-dimensional environment
[0110]
[01...
Embodiment 2
[0114] In the three-dimensional environment simulation experiment, the coordinates of the starting point are (0, 0, 100), and the coordinates of the target point are (100, 100, 100). Introduce the concept of flight safety circle, that is, the flying height of the UAV cannot be higher than the horizontal height of the flight safety circle. Here, the safety circle is set to be parallel to the surface and z=600m. Using the digital elevation map to set the panoramic and side views of the terrain model of the 3D UAV flight simulation environment, such as Figure 10 shown.
[0115] The parameter settings of BA, DEBA and CPFIBA are consistent with the two-dimensional experiment. Three algorithms are used to plan the route in the three-dimensional terrain space, and the route planning simulation results are as follows: Figure 11 As shown, the route cost fitness function convergence curve is as follows Figure 12 shown.
[0116] The comparison of the optimal path length, route cos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More