A GPS/INS integrated navigation method based on self-learning volumetric Kalman filter
A Kalman filter and integrated navigation technology, applied in the field of navigation positioning and deep learning, can solve problems such as the decline of integrated navigation accuracy, and achieve the effect of maintaining long-distance high-precision navigation and positioning effect and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
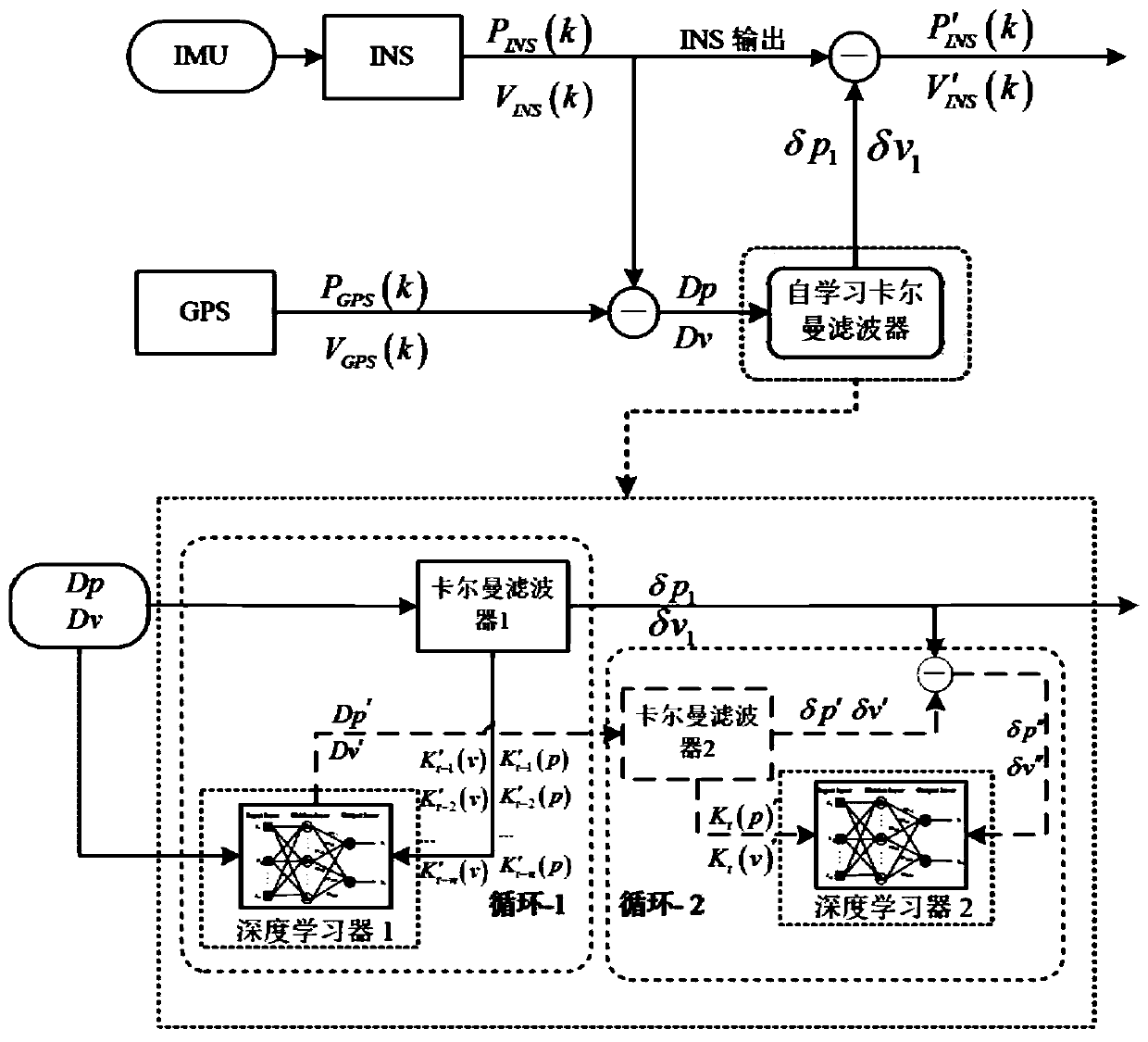
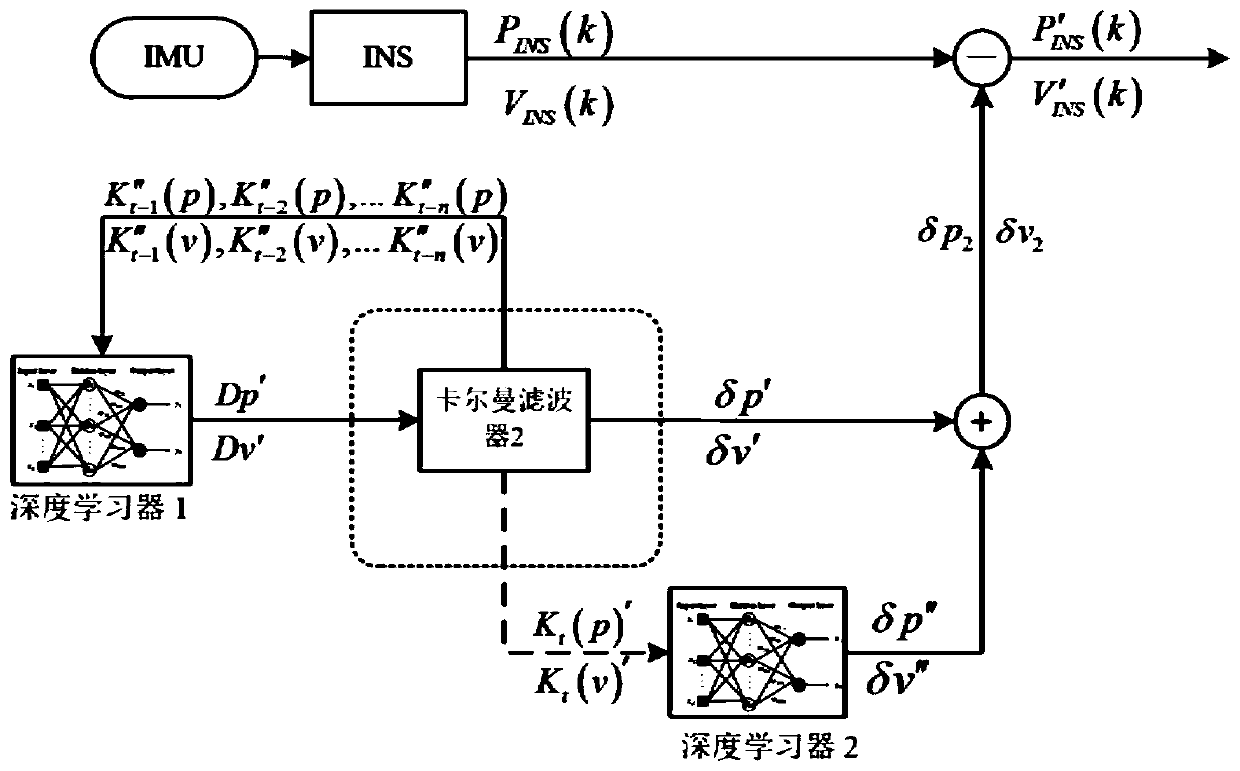
[0029] The present invention is oriented to intelligent vehicles' demand for intelligent navigation and positioning technology, and in order to solve the problem of GPS / INS seamless navigation under the condition of satellite signal loss, a GPS / INS integrated navigation method based on self-learning volumetric Kalman filter is proposed. This method divides the operation stage of INS / GPS integrated navigation system into training stage and error compensation stage. The training stage is the stage when the GPS signal is valid. When the GPS signal is good, the LSTM (Long Short Term Memory) network is used to establish the observations of the navigation system respectively. The prediction model and the optimal estimation error model use the self-learning Kalman filter composed of two cyclic filter subsystems, and use the speed difference and positi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More