

Visual mileometer method based on convolutional neural network
A convolutional neural network and visual odometry technology, applied in the field of navigation and positioning, can solve problems such as insufficient point pairs, odometer estimation errors, GPS signals cannot provide positioning and navigation, etc., and achieve robust feature points, accurate mileage or pose estimation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings.
[0038] refer to Figure 1 to Figure 5 , a visual odometry method based on a convolutional neural network, including the following steps:
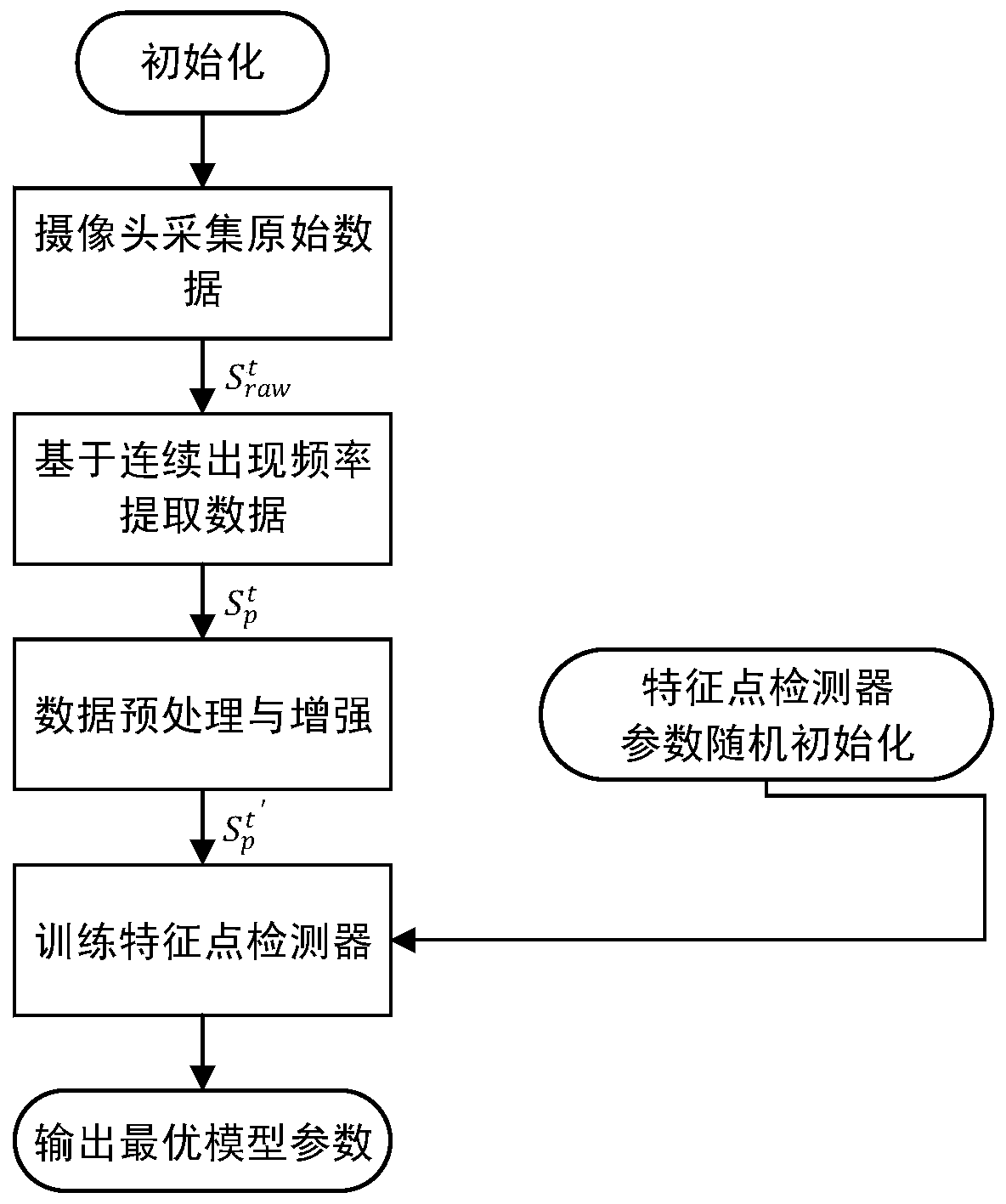
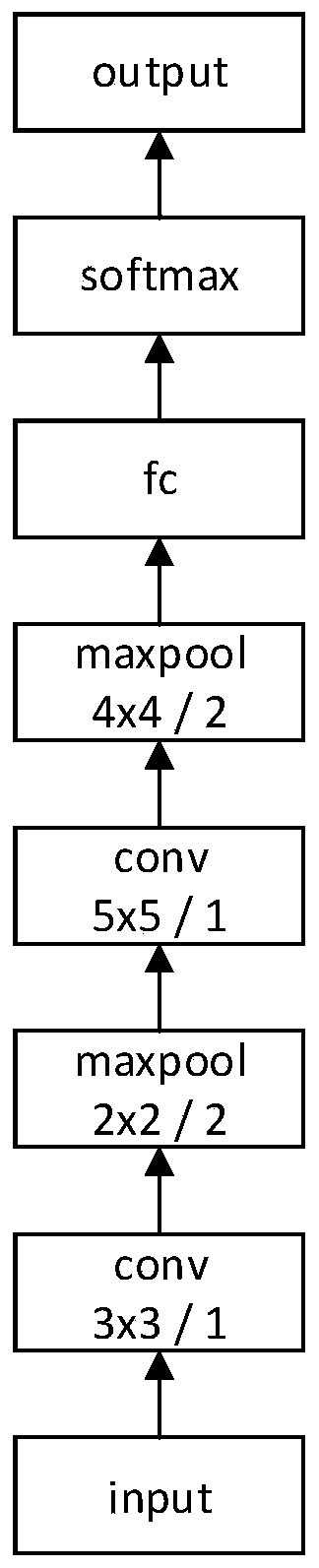
[0039] Step 1, collect the original environmental data through the camera carried by the mobile robot, and train the feature point detector A based on the convolutional neural network;
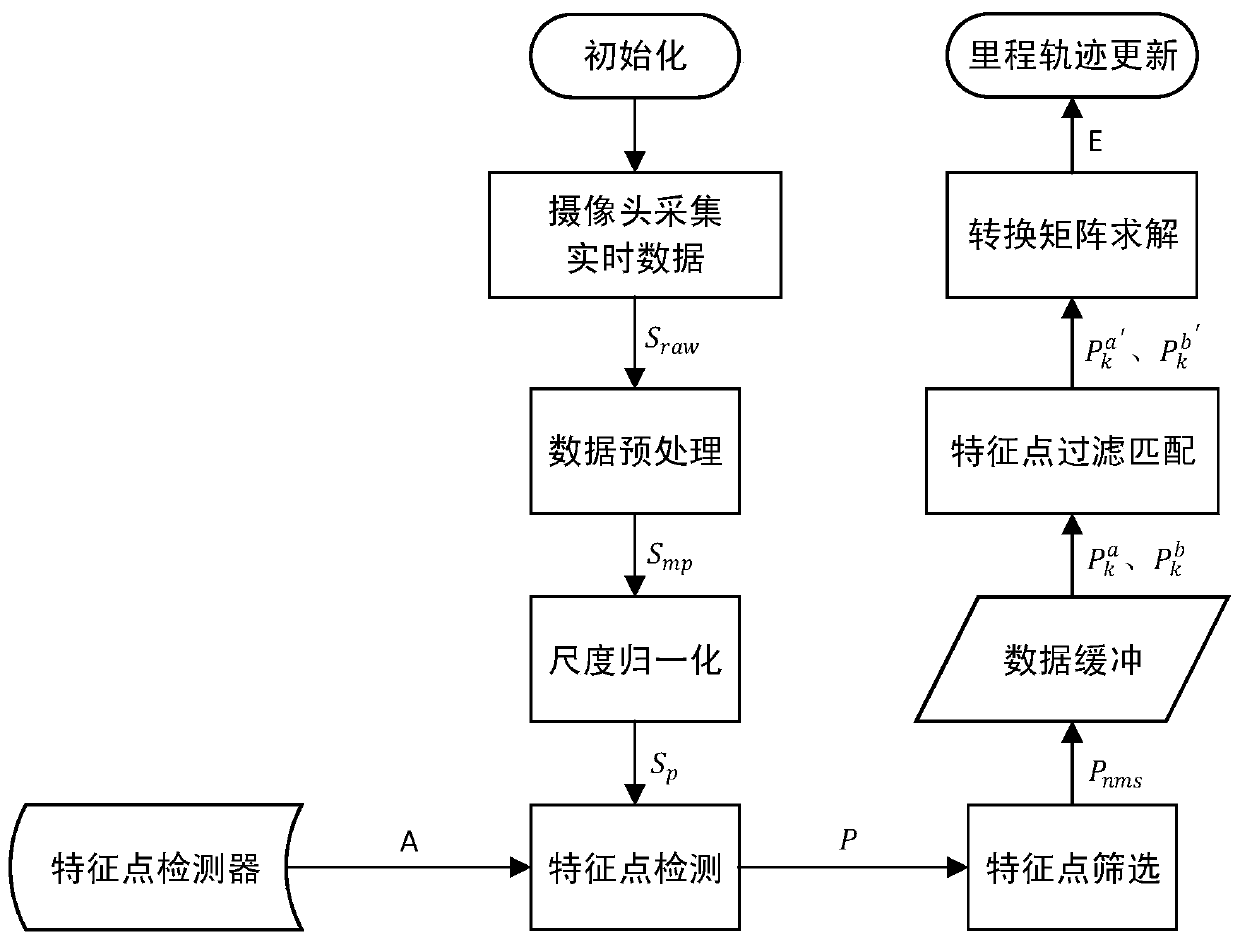
[0040] Step 2, the mobile robot executes the movement of the mileage to be estimated, and collects the raw data to be estimated through the camera carried;
[0041] Step 3, perform data sampling and clipping preprocessing operations on the data to be estimated collected by the camera to obtain the data to be processed;
[0042] Step 4, using the feature point detector A to filter the data to be detected to obtain feature point information;
[0043] Step 5, use the feature point information combined with the pole constraint method to solve the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More