

A soft robot based on two-sided pull wire
A technology of robots and robot bodies, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in free movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
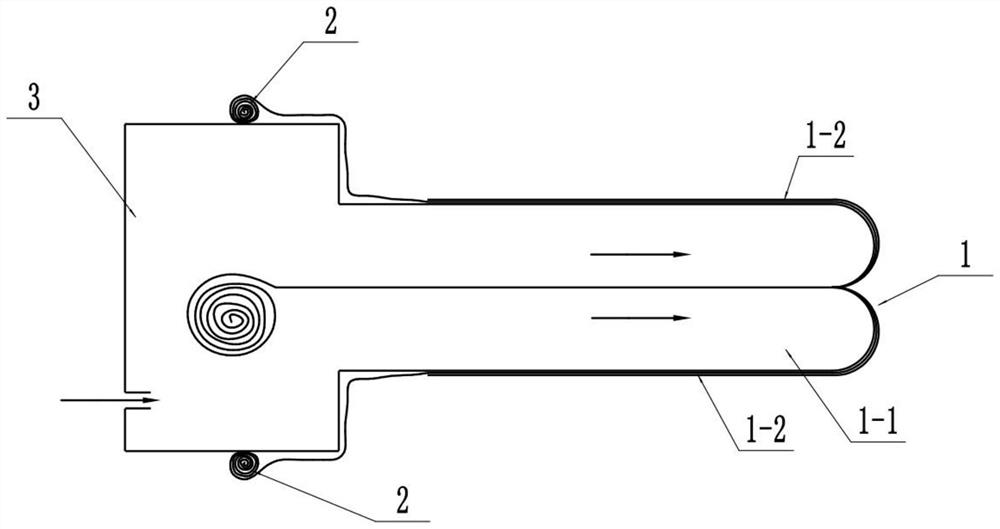
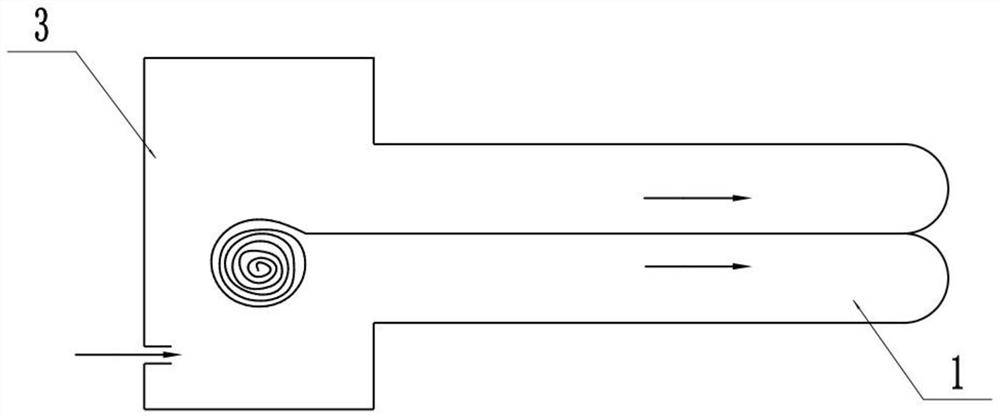
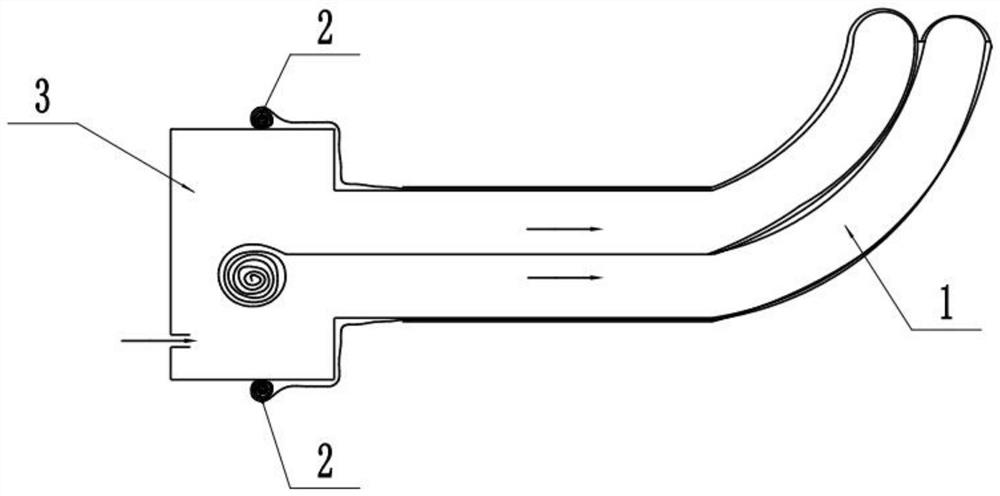
[0020] Such as Figure 1-4 Shown, a kind of soft robot based on two sides pull wire, comprises soft robot body 1, pull wire 2 and air-filled box 3, and described soft robot body 1 comprises plastic film pipe and plastic long film; The head end of described plastic film pipe is closed , the tail end of the plastic film pipeline is open, the tail end of the plastic film pipeline is fixedly connected on the inflatable box 3, the inner side of the plastic film pipeline forms an intermediate chamber 1-1, and the intermediate chamber 1-1 communicates with the inflatable box 3; There are two long films, and the two plastic long films are symmetrically fixedly connected to the two ends of the plastic film pipe; the cable chamber 1-2 with the head end closed and the tail end open is formed between the plastic long film and the plastic film pipe; There are two stay wires 2, the head ends of the two stay wires 2 are respectively fixedly connected to the head ends inside the two stay wire...
specific Embodiment approach 2
[0022] Such as Figure 1-4 As shown, the soft robot based on two side pull wires also includes a power source; The air pump is used to inflate the interior of the inflatable box 3, and inflate the interior of the intermediate chamber 1-1 through the inflatable box 3. After the intermediate chamber 1-1 is ventilated, it is affected by the internal air pressure of the intermediate chamber 1-1. , the middle chamber 1-1 is continuously stretched forward, and the soft robot body 1 moves forward.
specific Embodiment approach 3
[0024] Such as Figure 1-4 As shown, said a kind of soft robot based on both side pull wires also includes an extension control motor; said extension control motor is fixedly connected on the inflatable box 3, and the motor shaft I of the extension motor is sealed and rotated on the inflatable box 3; The head end of the plastic film pipeline and the long plastic film is wound inwardly on the motor shaft 1 inserted into the inflatable box 3. After the extension control motor is connected to the power supply and turned on, the motor shaft I of the extension control motor can roll up or unfold the plastic film pipe and the plastic long film of the soft robot body 1. When the air pump is inflated, the plastic film of the soft robot body 1 Thin film ducts and long plastic films allow the invention to move straight ahead.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More