

Pipeline crawling robot
A crawling robot and pipeline technology, applied in the field of crawling robots, can solve problems such as poor versatility and inability to effectively avoid obstacles, and achieve the effect of expanding the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings.
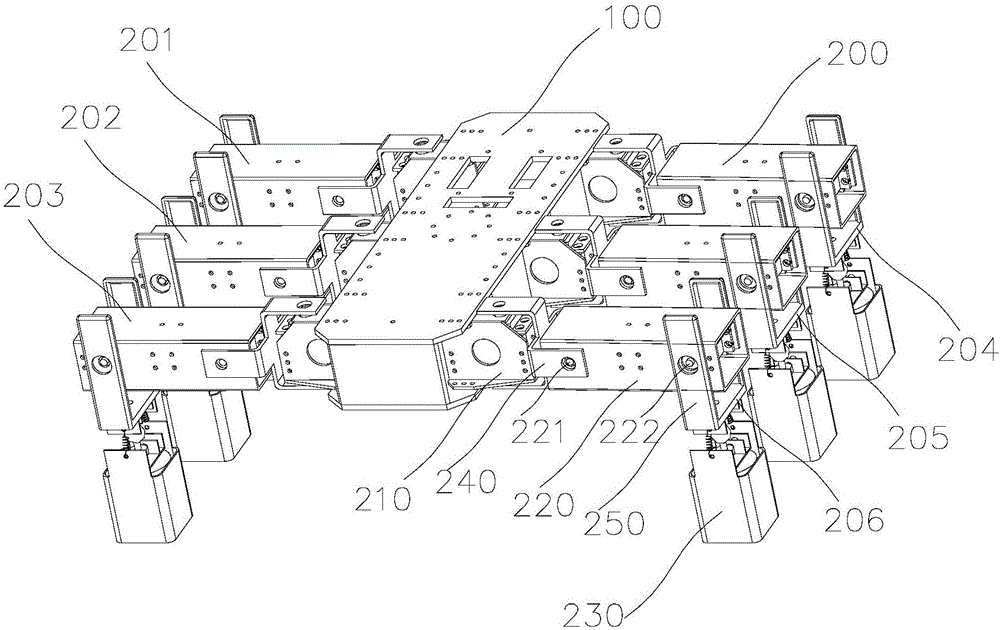
[0027] Existing pipeline robots mainly include wheel type and telescopic rod type, but the problems of incapability of cornering, inability to avoid obstacles, and poor versatility seriously limit their use. The main innovation of the present invention is that the pipeline crawling robot adopts a bionic structure, which can imitate the movement mechanism and behavior of hexapods, improve the movement ability and efficiency of the robot movement, realize the integration of bionics and robot technology, and have good The maneuverability, the ability to overcome obstacles and the ability to pass through complex terrain have been greatly improved.
[0028] The robot has six legs, and each foot has three sets of servo motors, that is, three degrees of freedom, and a total of 18 degrees of freedom. Each degree of freedom allows the legs to rotate freely w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More