

A multi-degree-of-freedom robot intelligent obstacle avoidance method and system thereof
A technology of robot intelligence and degree of freedom, applied in the field of robotics, can solve the problems of limited popularization, poor adaptability to complex terrain at the fire site, and weak ability to avoid obstacles, so as to improve the speed of rescue, improve the probability of rescue, and reduce fire. increased effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] use Figure 1 to Figure 2 A multi-degree-of-freedom robot intelligent obstacle avoidance method and system thereof according to an embodiment of the present invention are described as follows.
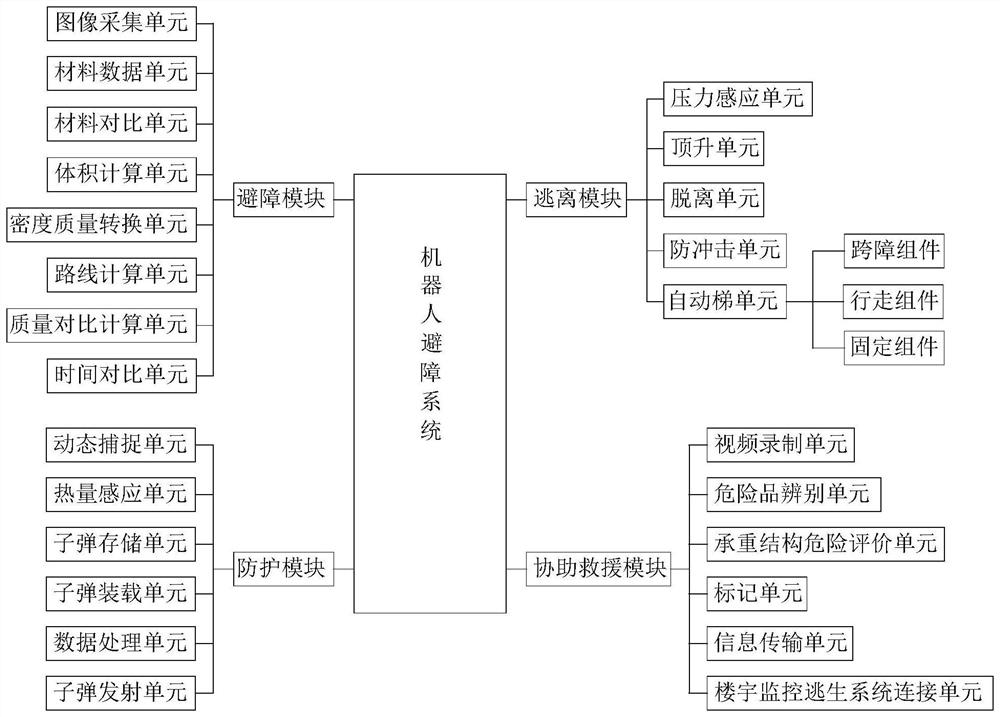
[0022] Such as figure 1 As shown, a multi-degree-of-freedom robot intelligent obstacle avoidance system according to the present invention includes an obstacle avoidance module, a protection module, an escape module and an assisting rescue module; the obstacle avoidance module includes an image acquisition unit, a material data unit, a material comparison unit, a volume calculation unit, a density-mass conversion unit, a route calculation unit, a mass comparison calculation unit and a time comparison unit; the image acquisition unit is used to collect images of obstacles; the material data unit is used to store a variety of The color, shape and volume characteristics of the material; the material comparison unit is used to compare the obstacle image collected by the image acqui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More