

A navigation method and agv based on indoor microwave base station
A navigation method and base station technology, applied in two-dimensional position/channel control and other directions, can solve the problems of cumulative error, high requirements for suitable occasions, and great influence by obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
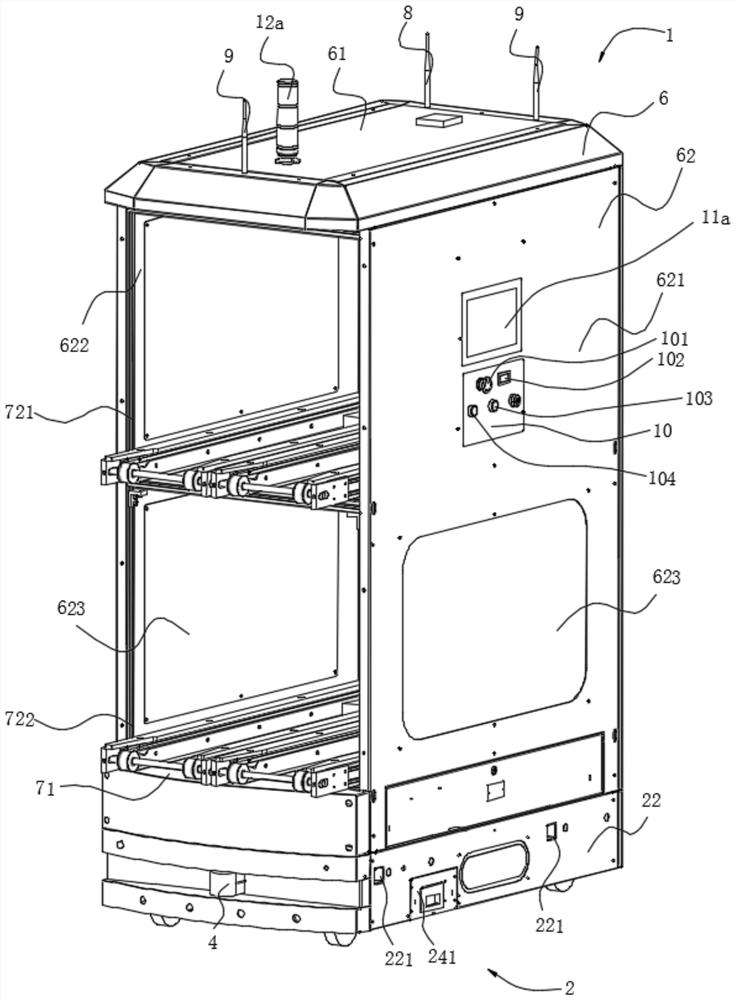
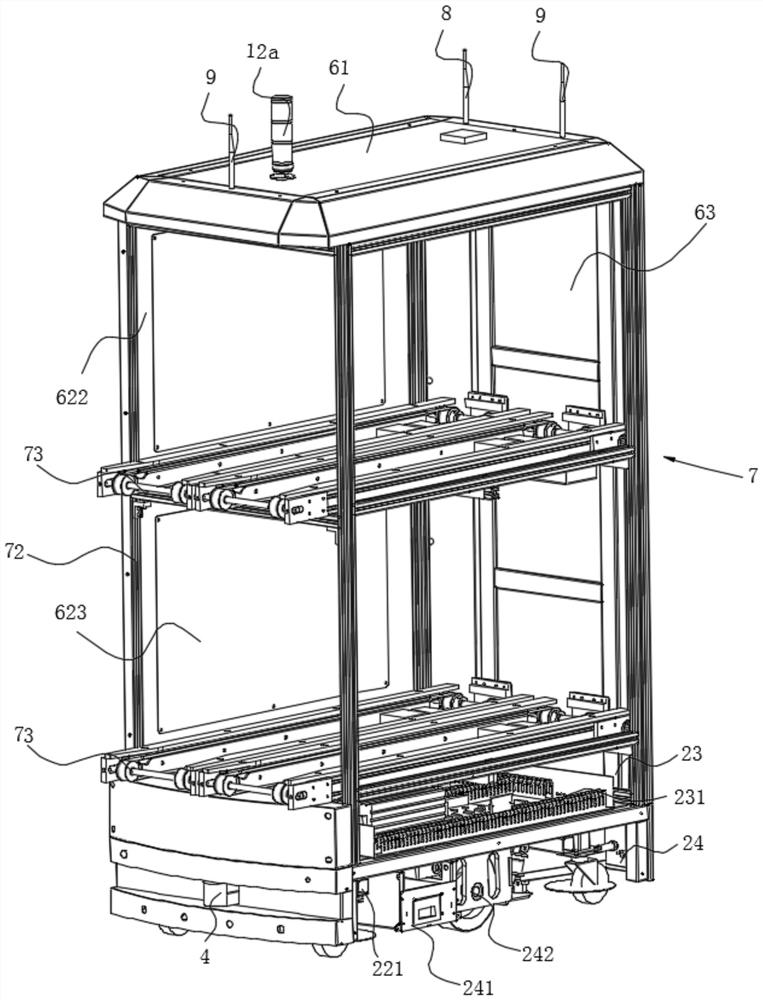
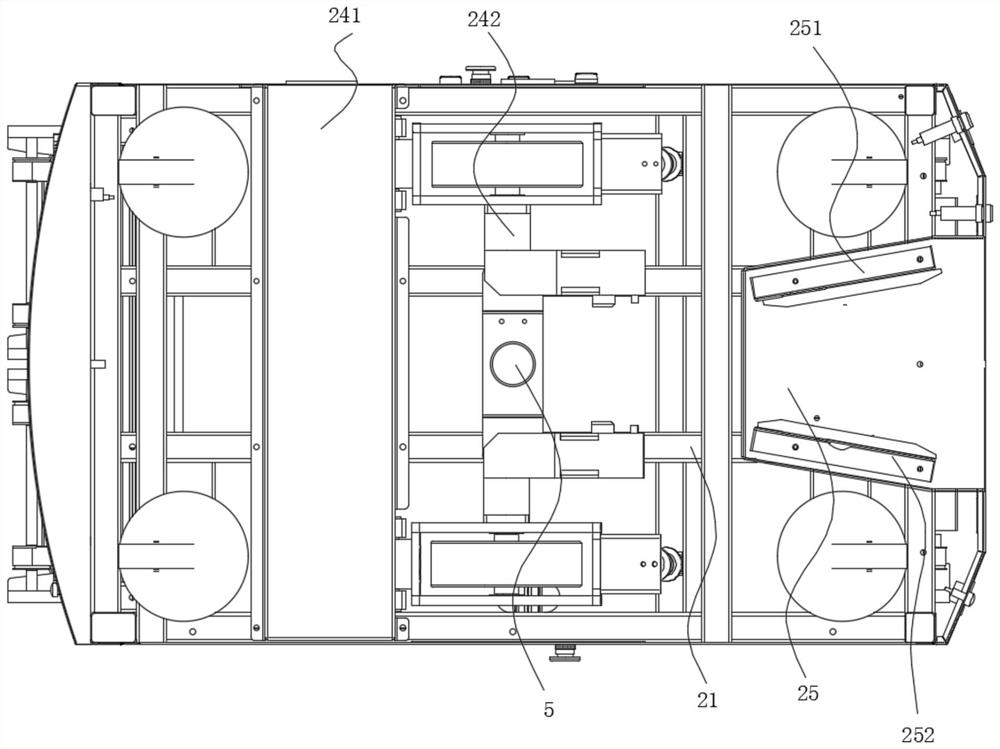
[0067] Such as Figure 1 ~ Figure 3 As shown, an AGV based on indoor microwave base station navigation includes a transport container 1 and an AGV vehicle body 2, and the AGV vehicle body 2 includes a vehicle body chassis 21 welded by rectangular tubes, a vehicle body shell 22 and a vehicle body frame .
[0068] Such as figure 1 and figure 2 As shown, the center of the front end of the AGV car body 2 is provided with a U-shaped groove inwardly, and the middle part of the U-shaped groove is provided with an obstacle detection sensor 4, which is used to detect and obtain information about obstacles around, and send this information Pass it to the control system to play the function of obstacle avoidance.
[0069] The conveying container 1 includes a container shell 6 and a conveying mechanism arranged in the container shell. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More