

A motion planning method for machine tool machining trajectory based on sinusoidal square acceleration look-ahead
A technology of processing trajectory and motion planning, applied in digital control, electrical program control, etc., can solve problems such as large vibration excitation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The algorithm will be described in detail below in conjunction with the accompanying drawings, so that the advantages and characteristics of the algorithm can be more easily understood by those skilled in the art, so as to make a clearer definition of the protection scope of the algorithm.
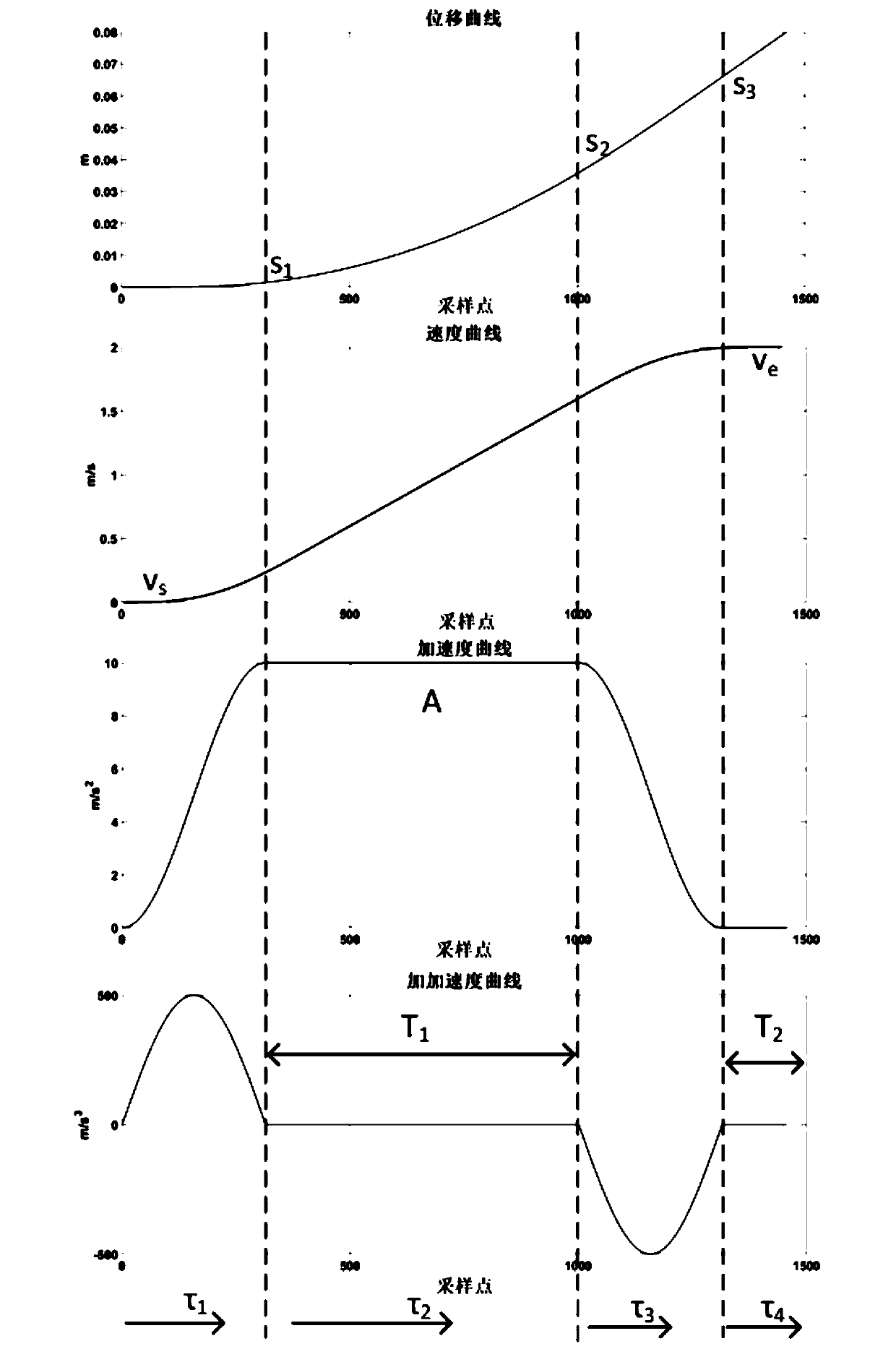
[0059] This algorithm is suitable for all motion planning applications, figure 1 is based on the traditional sine 2 Accelerated motion curve. We call the basic element of the motion planning algorithm a planning segment that satisfies the initial velocity v s to drive out of the speed limit V e , to complete the planning with path length l, jerk limit J, and speed limit A, and a planning segment takes time T and is divided into four segments. The first paragraph and the third paragraph respectively have sine 2 half cycle acceleration, the second stage is the uniform acceleration stage, the acceleration is equal to A, and the elapsed time is T 1 , the fourth stage is the constan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More