

Filter technique based numerical control system acceleration and deceleration control method
A technology of acceleration and deceleration control and numerical control system, applied in the direction of digital control, digital technology network, electrical program control, etc., can solve problems such as poor compatibility, S-curve acceleration and deceleration planning software implementation complexity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
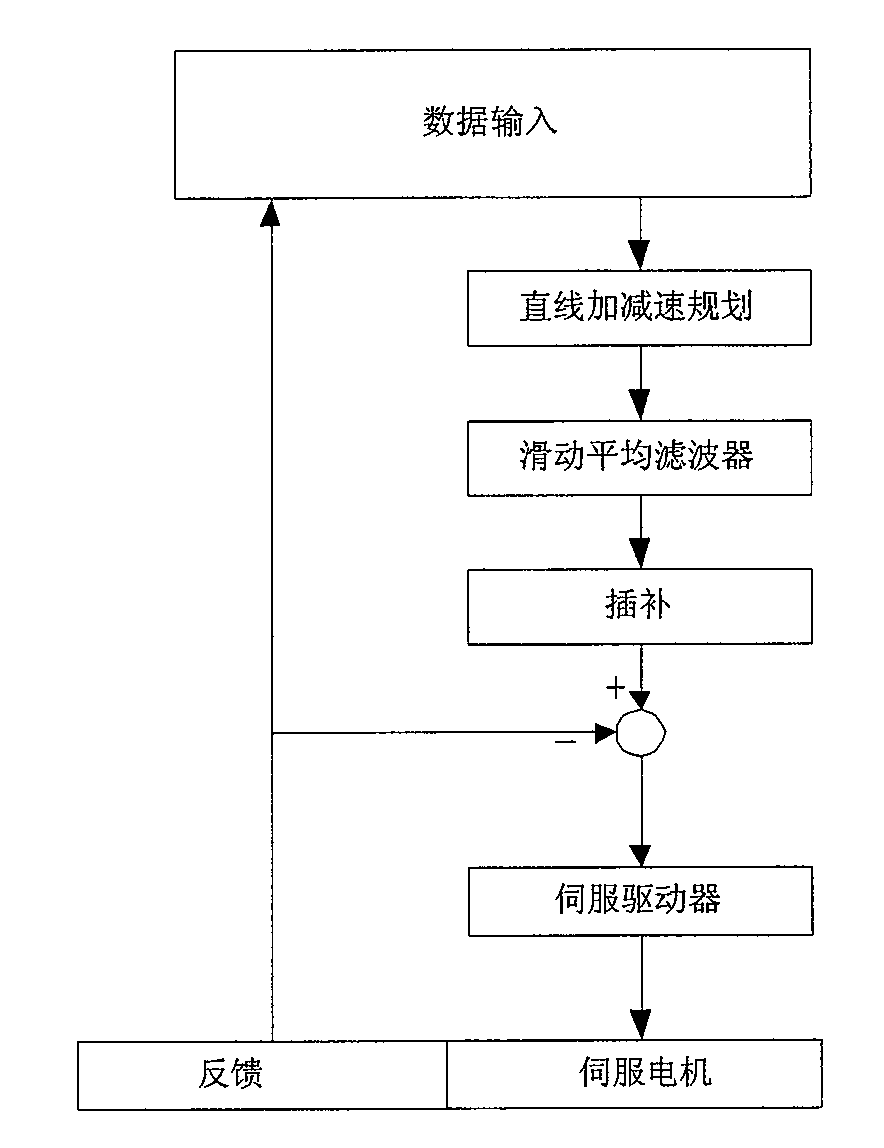
[0036] Such as figure 1 Shown, the inventive method comprises the following steps:
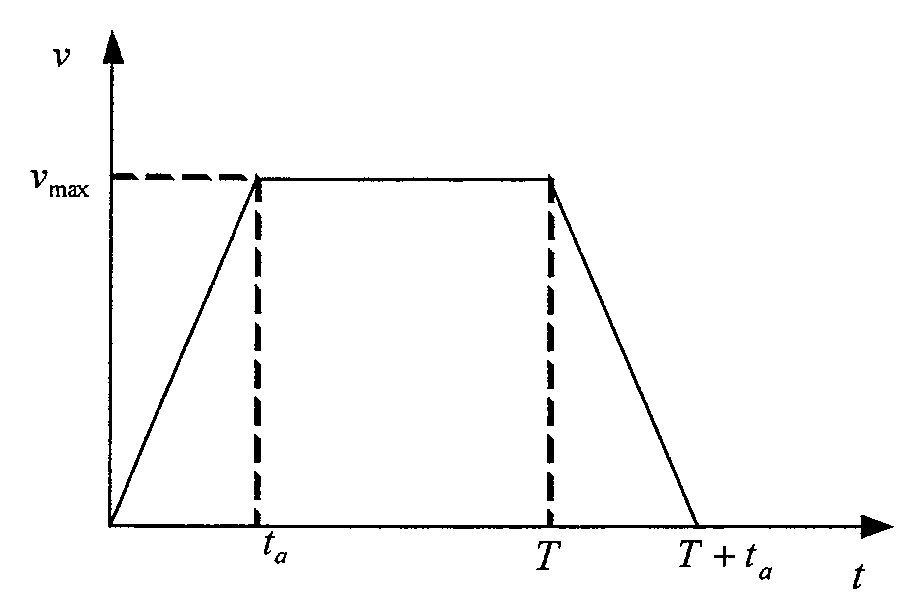
[0037] Use the input workpiece program data to plan linear acceleration and deceleration;
[0038] Perform sliding average filtering and filter compensation on the speed planned for linear acceleration and deceleration to obtain a new planned speed value and position value; interpolate the position value; control the servo motor through the position value obtained by the interpolation through the servo drive.
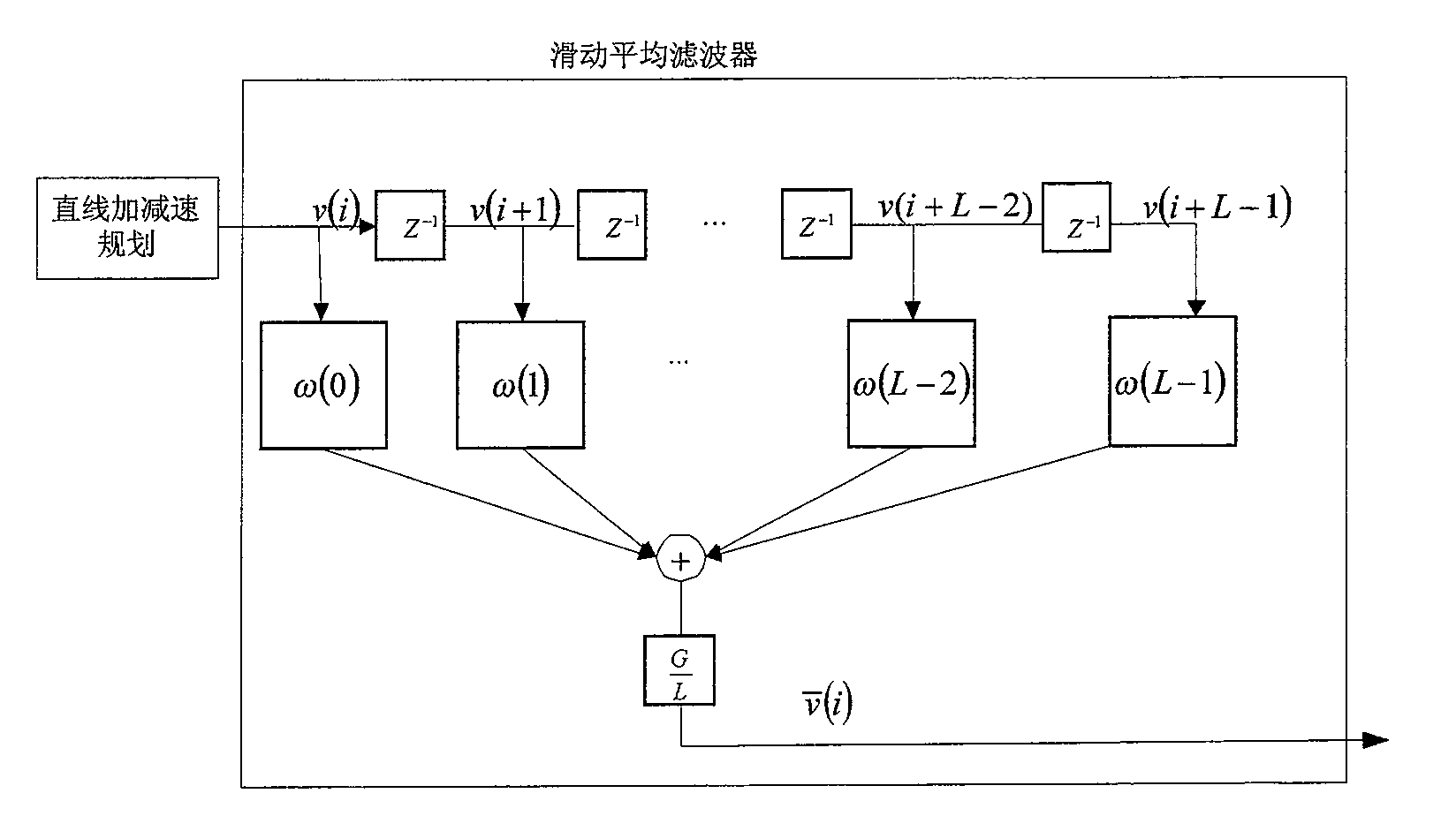
[0039] The speed of the straight-line acceleration and deceleration planning is done with a sliding average filtering process by adding a sliding average filter after the straight-line acceleration and deceleration planning to control the sudden change of the acceleration, which specifically includes the following steps: calculating the speed with the sliding average filtering speed planning method ;Select the filter length to change the smoothness of linear acceleration and decelerati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More