

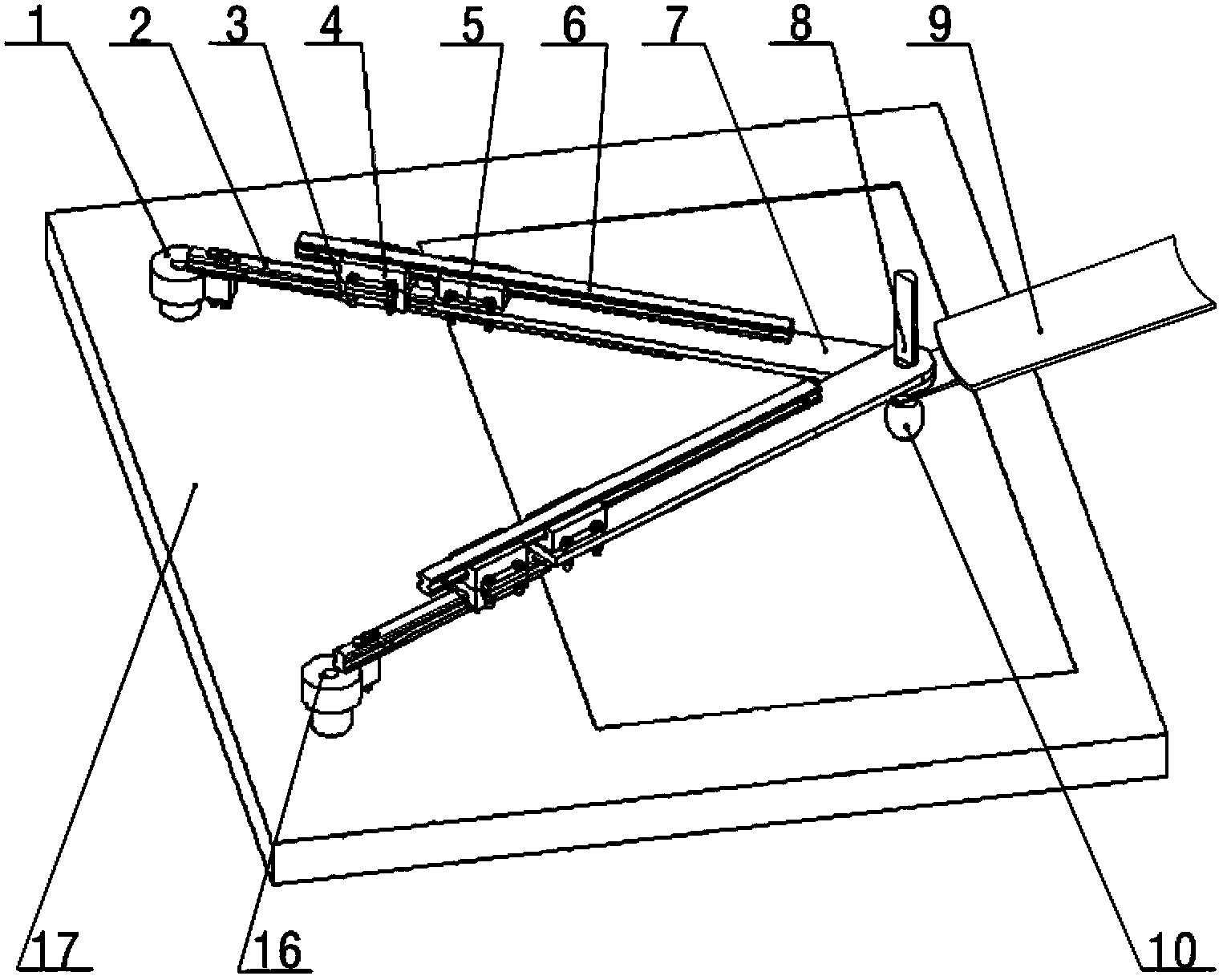
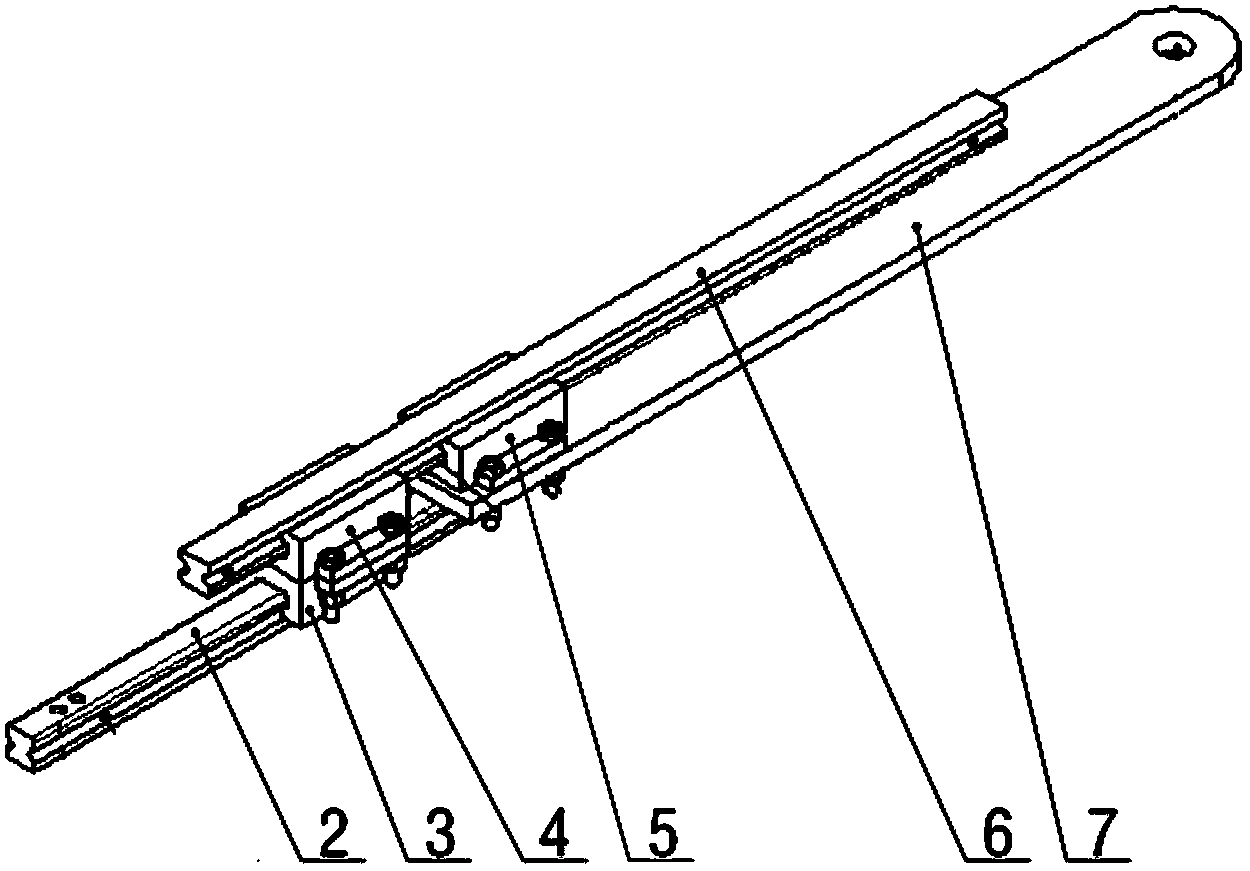
Parallel robot for planarly training upper limbs hemiplegia for multistage rehabilitation
A multi-stage, robotic technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems that the patient's operating ability cannot be accurately reflected, the speed and acceleration of the patient's operation are discontinuous, and the adaptability is not high. Improve smoothness and mechanism fault tolerance, good human-computer interaction ability, and high mechanism flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention provides a multi-stage rehabilitation parallel robot for plane training upper limb hemiplegia. The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0018] The working principle of the present invention is: in the rehabilitation process, the smaller the influence brought in by the auxiliary device, the better. The ideal state is that there is no bad load, and no factors affecting emotions are brought in when the patient is exercising. Such a mechanism can reflect the patient's nervous system. Control and Muscle Mobility. When the patient's motor consciousness is disturbed and delayed, the mechanism does not conform to the patient's operating will, and the human-computer interaction is hindered, the psychology and physiology of the hemiplegic patient will be affected, and even convulsions will occur in severe cases. Especially in the case where it is necessary to observe the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More