Vehicle operation control method and device based on automatic driving
A vehicle operation and control method technology, applied in the automotive field, can solve problems such as complex algorithms, inability to predict the road state in advance, and inability to calculate the actual road surface state well, so as to improve safety and reduce the risk of entering an unstable state The effect of chance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only some structures related to the present invention are shown in the drawings but not all structures.
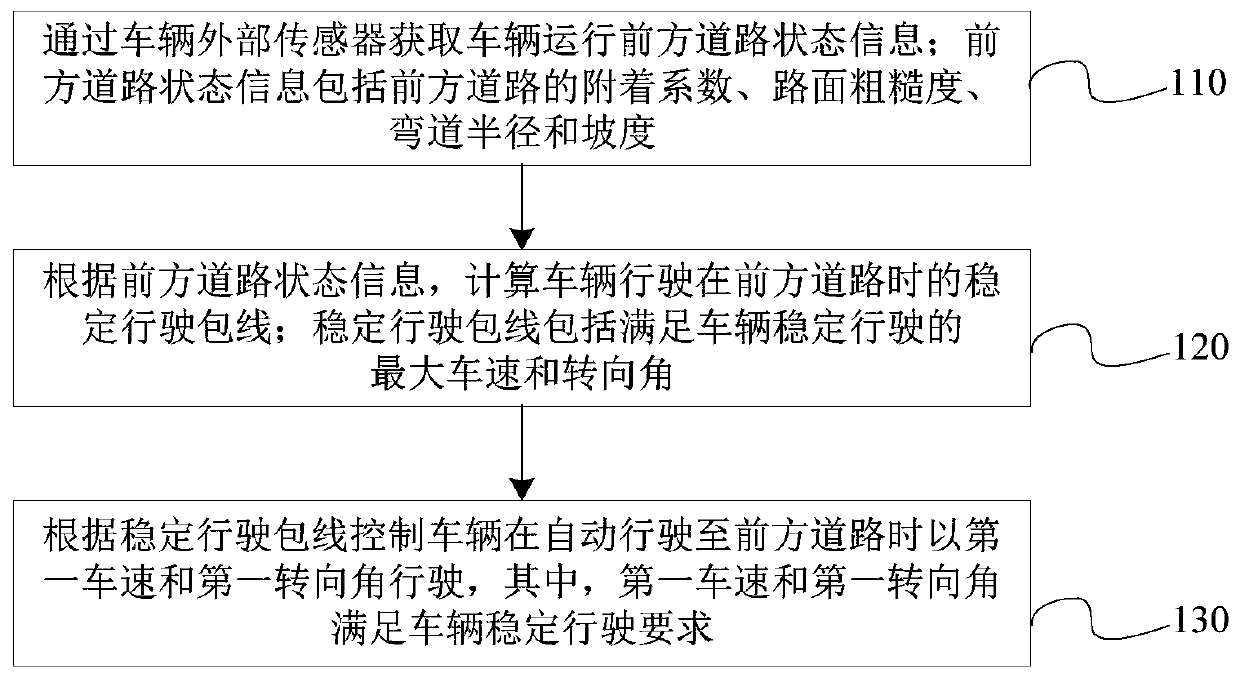
[0066] figure 1 It is a schematic flowchart of an automatic driving-based vehicle operation control method provided by an embodiment of the present invention. Such as figure 1 As shown, the specific steps of the vehicle operation control method include:
[0067] 110. Obtain the state information of the road ahead of the vehicle through the external sensor of the vehicle; the state information of the road ahead includes the adhesion coefficient, road surface roughness, curve radius and slope of the road ahead;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More