

Path planning method based on non-display topology vector map
A technology of vector map and path planning, which can be applied to measuring devices, road network navigators, instruments, etc., and can solve problems such as application difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
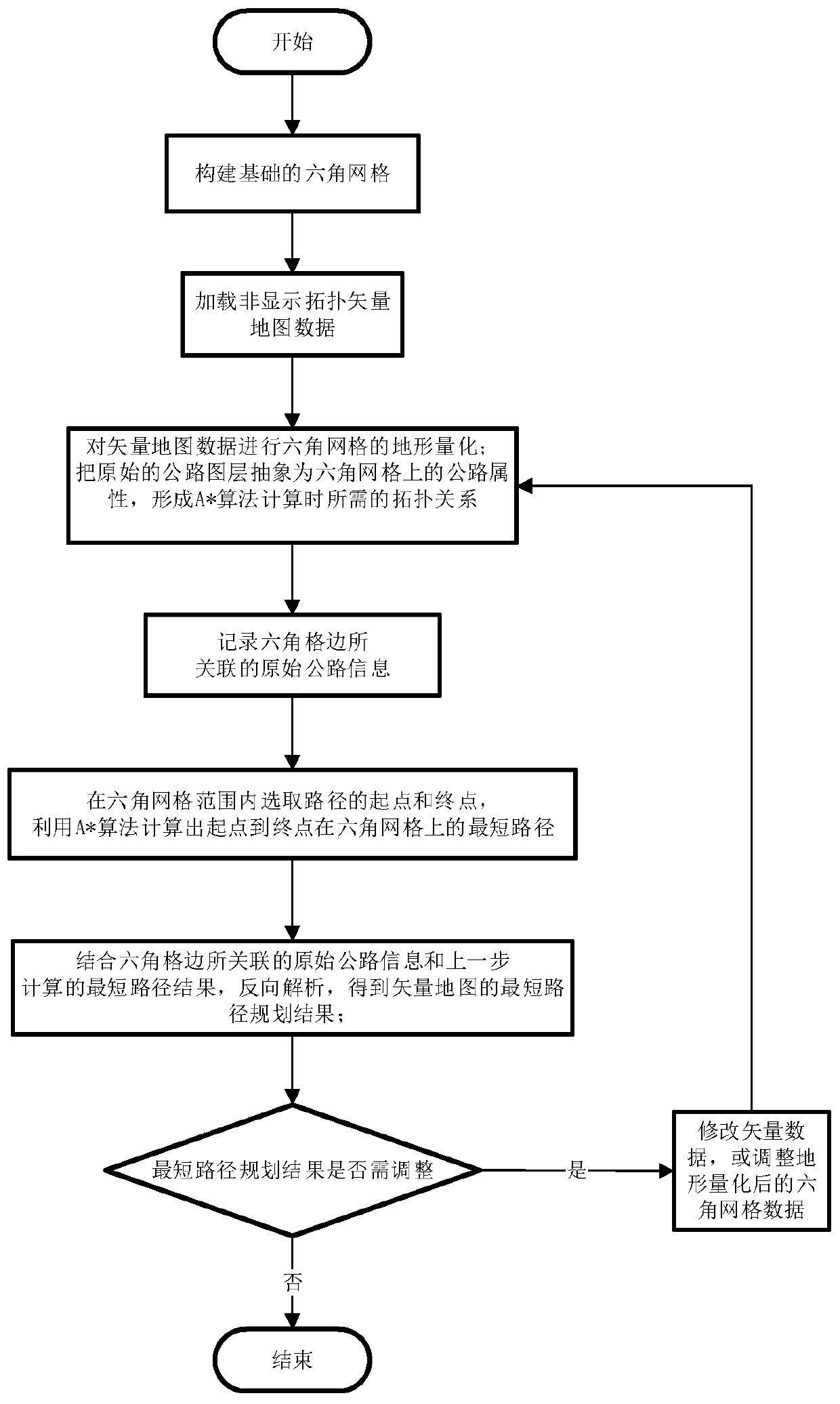
[0045] See figure 1 , which shows a flow chart of a path planning method based on a non-display topology vector map according to the present invention, the method includes the following steps:
[0046] Step 1: Build the base hex grid:
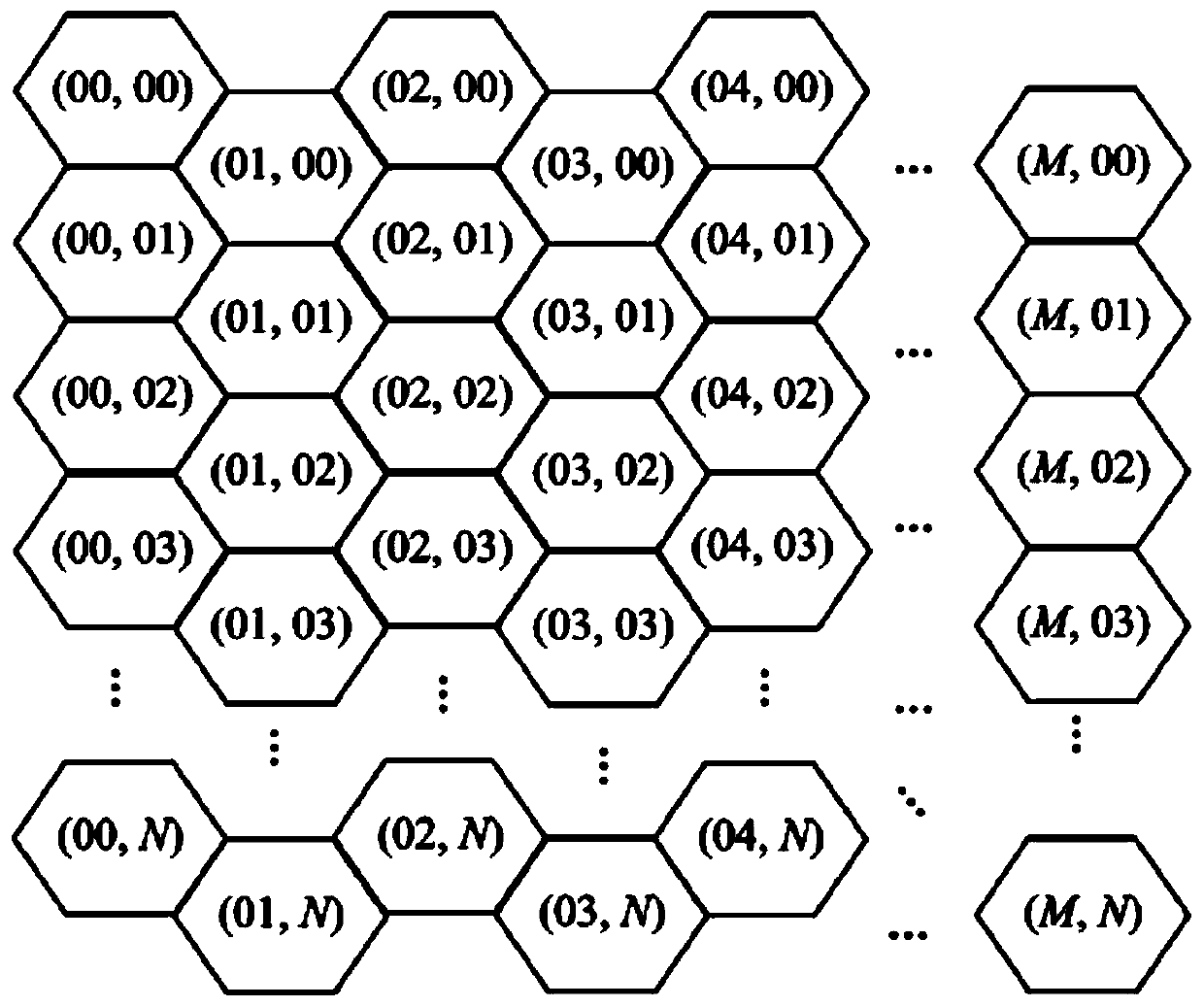
[0047] Define a hexagonal grid numbering scheme, such as figure 2 As shown, the abscissa M and the ordinate N represent the column index and the row index in the hexagonal grid respectively;
[0048] According to actual data, such as: path planning range, original vector road layer data (such as Figure 6 As shown), the speed of the vehicle under different terrain and different grades of roads, set the size of the hexagonal grid, and establish a hexagonal grid model (such as Figure 7 shown), and build a data structure, wherein the unit of the hexagonal grid is an adjacent spliced hexago...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More